

Kinect sensor based two-hand tracking method and device
A tracking device and sensor technology, applied in the field of gesture recognition and hand tracking, can solve the problems of high computational complexity, unsatisfactory recognition and tracking effects, too many restrictions on user posture, etc., and achieve the effect of low computational complexity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
[0046] A method for tracking both hands based on Kinect, comprising:
[0047] S1 video acquisition step, obtains the color video stream and the depth video stream with the same resolution and frame rate from the Kinect sensor;
[0048] S2 Detection step 1, detecting the first hand that makes the initial gesture from the images of the acquired color video stream and depth video stream;
[0049] S3 single-hand tracking step, using the position information and size information of the first hand in the previous frame or more than two frames to locate and track the first hand;
[0050] S4 detection step 2, using the position information and size information of the first hand to detect the second hand;
[0051] S5 is a two-hands tracking step, tracking the detected hands.
[0052] The step S2 further includes: S2-1 sample training step; S2-2 mode selection step; S2-3 initial gesture determination step.
[0053] In the step S2-1, the SVM classifier is selected to learn and train the...
Embodiment 2
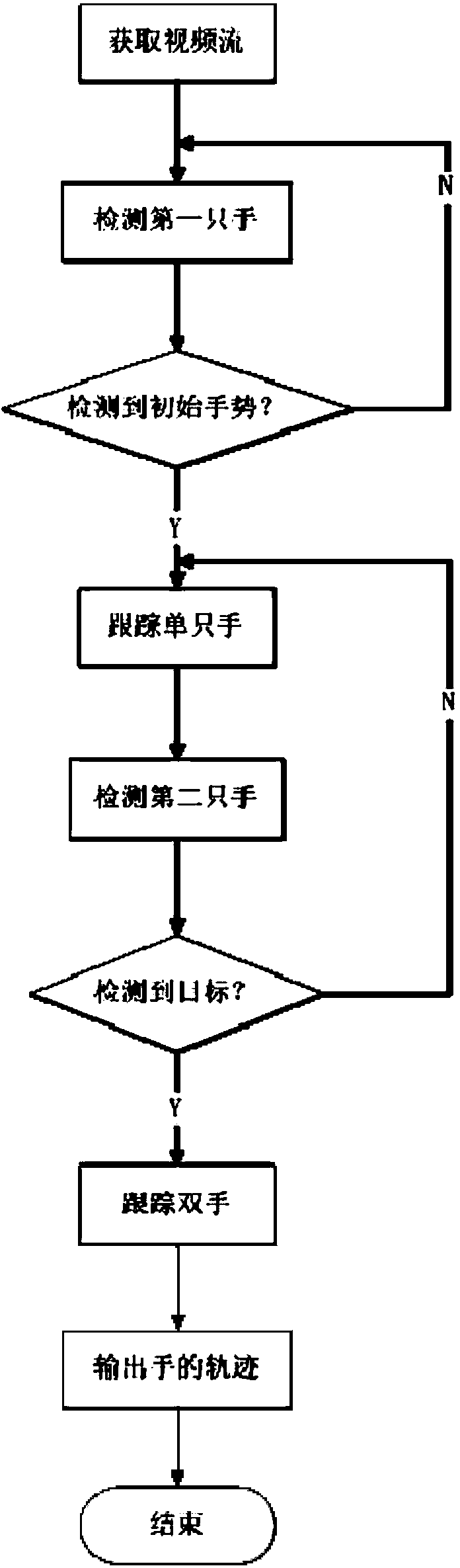
[0062] Such as figure 1 Shown is the flow chart of the hands tracking of this embodiment, including:
[0063] Step 1) Get the video stream. For example, the Kinect sensor is used to obtain a color video stream and a depth video stream with a resolution of 640*480 and a frame rate of 30fps.
[0064] Step 2) Detect the first hand. That is, detect the first hand from the acquired color map and depth map. Specifically, according to the depth information and skin color information or shape information, the nearest large enough target object is used as the first hand.
[0065] Step 3) Determine whether the initial gesture is detected. That is, it is judged whether the first hand found is making the initial gesture. When the hand stretches forward and the distance from the body is above the threshold d, it is determined that the hand makes a valid initial gesture, and the tracking starts. Mark this hand as Hand1, and store its three-dimensional position information into the tra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More