

Robot with functions of rolling motion and foot walking
A robot and functional technology, applied in the field of robotics, can solve the problems such as the large difference in structure between spherical robots and footed robots, achieve broad development space and application prospects, improve free movement capabilities, and achieve the effects of high-efficiency and reliable movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
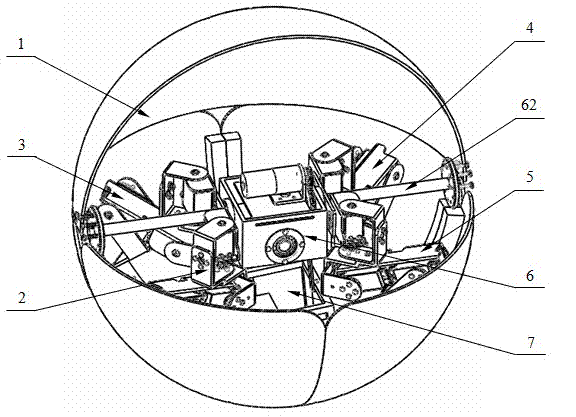
[0033] Such as figure 1 As shown, the robot with rolling motion and foot walking function includes a spherical shell module 1 , a foot module, a drive module 6 and a counterweight module 7 . The drive module 6 is located in the center of the inner cavity of the spherical housing module 1, and the two ends of a main shaft 62 in the driving module 6 are fixedly connected with an upper hemispherical housing 11 of the spherical housing module 1, and the middle part of the main shaft 62 is connected to the foot. One end of the four foot module subunits 2, 3, 4, 5 in the head module is fixedly connected respectively, and the other end of each foot module subunit 2, 3, 4, 5 is connected to the four corresponding ones in the spherical shell module 1. The lower hemispherical shell subunits 12, 13, 14, 15 are fixedly connected, and the counterweight module 7 is connected to a steering shaft 64 in the drive module 6, and is located in the lower hemispherical body cavity of the inner cav...
Embodiment 2
[0035] This embodiment is basically the same as Embodiment 1, and the special features are as follows:
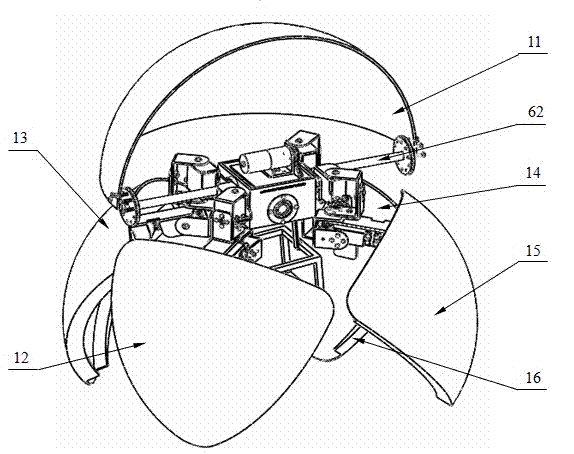
[0036] Such as figure 2 As shown, the spherical shell module 1 of the robot with rolling motion and foot type walking function includes one upper hemispherical shell 11 of a hollow thin-walled spherical shell and four lower hemispherical shells that equally divide the lower hemispherical shell into four parts. The body subunits 12, 13, 14, 15 are each equipped with a fixed block 16, which is a mechanical limit structure that prevents the robot from being deformed in a spherical state.
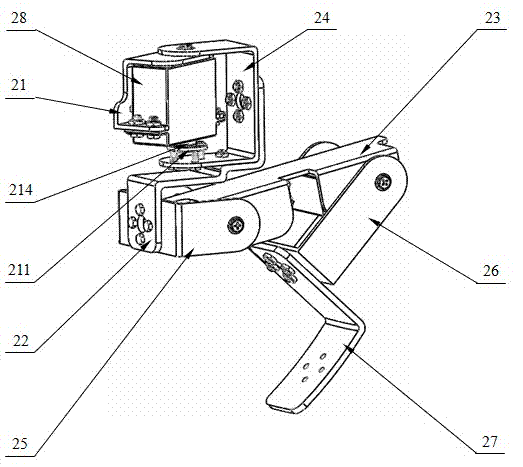
[0037] The foot module described in this robot with rolling motion and foot type walking function includes four groups of identical and independent foot module subunits 2, 3, 4, 5, and the main structure of each subunit includes hip joint 21, thigh joint 22 and shank joint 23, are the tandem combined mechanism with three degrees of freedom, so this robot has 12 degrees of freedom of m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More