

Crane obstacle monitoring and early warning method and system based on binocular vision
A binocular vision system and binocular vision technology, applied in the field of crane obstacle monitoring and early warning and system based on binocular vision, can solve crane work interference, crane, obstacle influence, and inaccurate analysis of cranes and obstacles And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
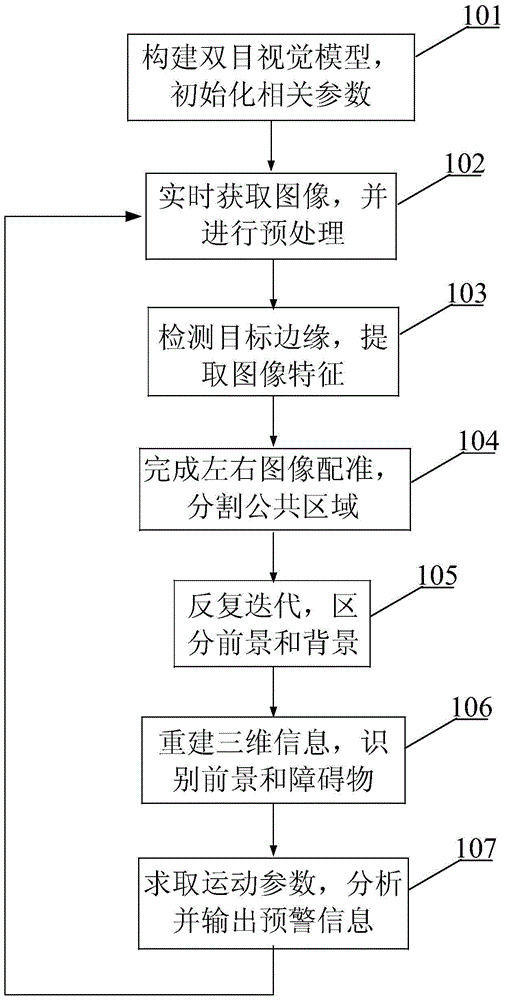
[0055] figure 1 It is a flow chart of the crane obstacle monitoring and early warning method provided by the present invention.
[0056] The binocular vision-based crane obstacle monitoring and early warning method provided by the present invention includes the following steps:
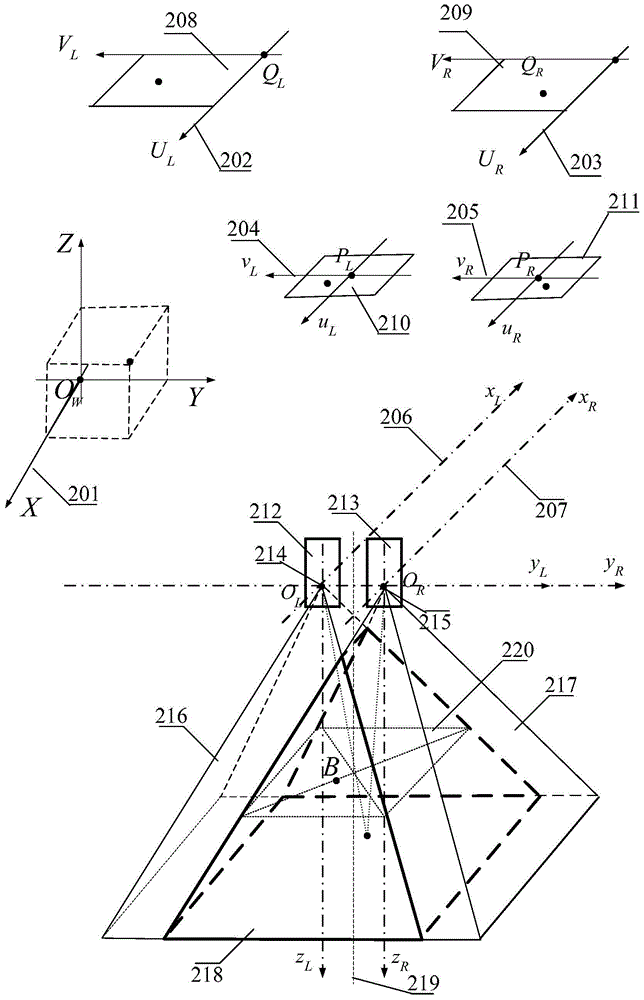
[0057] Step 101: Build a binocular vision model and initialize relevant parameters. In order to accurately describe and analyze the status information of space objects, it is necessary to establish a binocular visual coordinate model, mainly including the world coordinate system, camera coordinate system, imaging coordinate system and pixel coordinate system; at the same time, the relevant data should be initialized, that is, obtained through camera calibration The internal parameters of the camera, the baseline distance is obtained through measurement or pre-setting, and the world coordinate system is initialized through other devices (such as the positioning system of the bridge crane), so as to de...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More