Wheel-claw type endoscope robot
A technology of endoscopic robot and wheel claw, which is applied in ovulation diagnosis, in vivo radio detector, medical science, etc., can solve problems such as unsuitable for the complex environment of the intestinal tract, unachievable technical level, and difficult energy supply, etc., to achieve The effect of less friction consumption, less damage, and better performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0011] With reference to the accompanying drawings, the wheel-claw-type endoscopic robot of the present invention will be described in detail below with a specific embodiment, but it is not intended to limit the present invention.
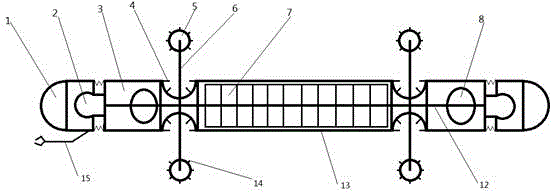
[0012] In the embodiment, the endoscopic robot is composed of four parts: a camera assembly, a biopsy forceps, a body, a wheel claw assembly, a circuit board, and a power supply.
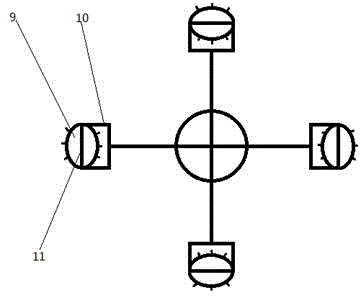
[0013] The camera components are fixed in the hemispherical structures at both ends of the fuselage, the hemispherical structures are fixed on both ends of the fuselage by universal joints, and the wheel claw components are evenly distributed around the fuselage.
[0014] Before use, the examinee empties the bowel, then lies on the examination bed, and applies sedative drugs appropriately. Taking the entry through the mouth as an example, after the machine is sent into the stomach from the mouth, the robot starts to work, and the image transmission and wirele...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com