Flywheel-driven carrying robot
A technology of robots and inertia wheels, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as different dynamic characteristics, high precision requirements, and difficulty in improving motion control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
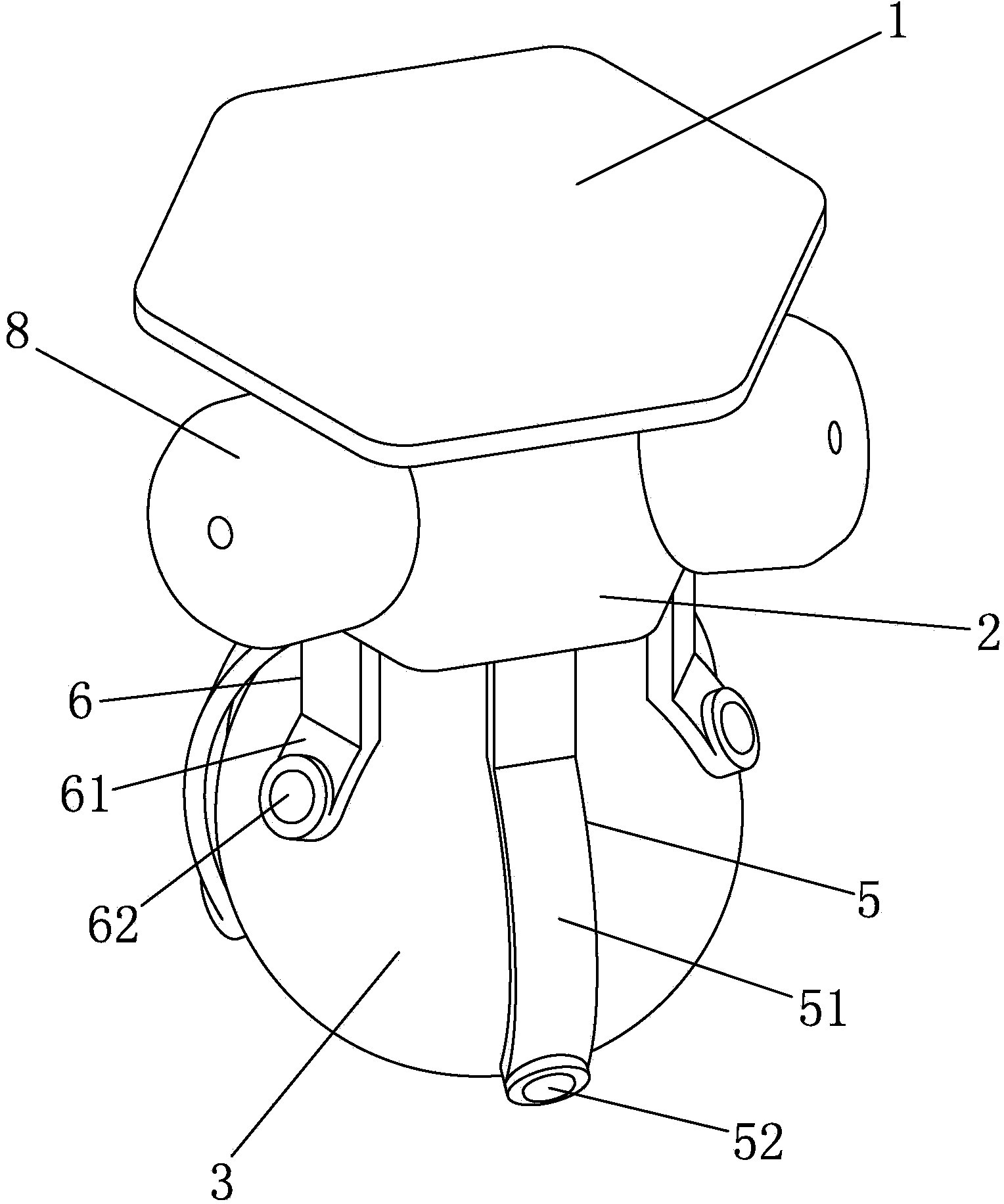
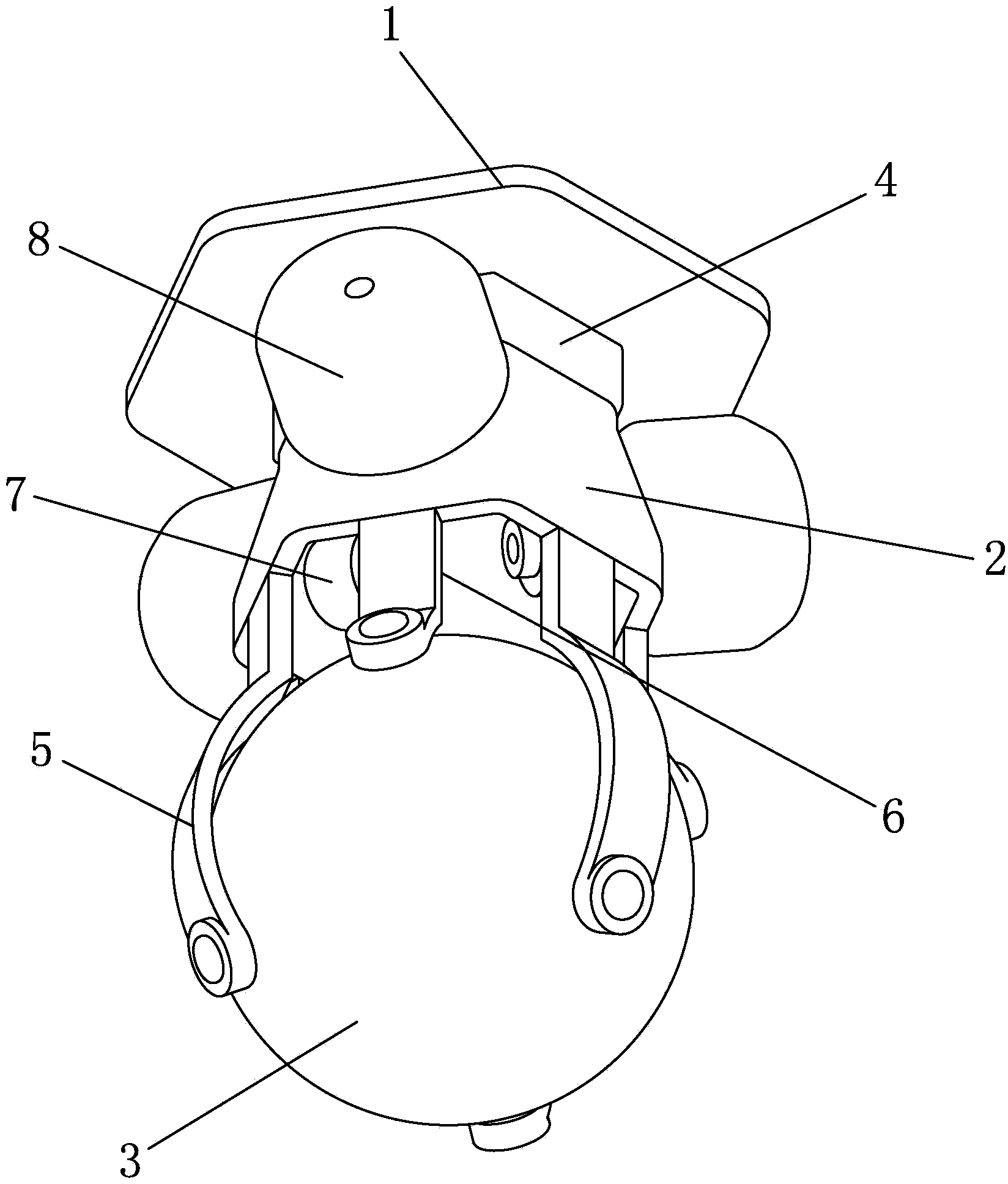
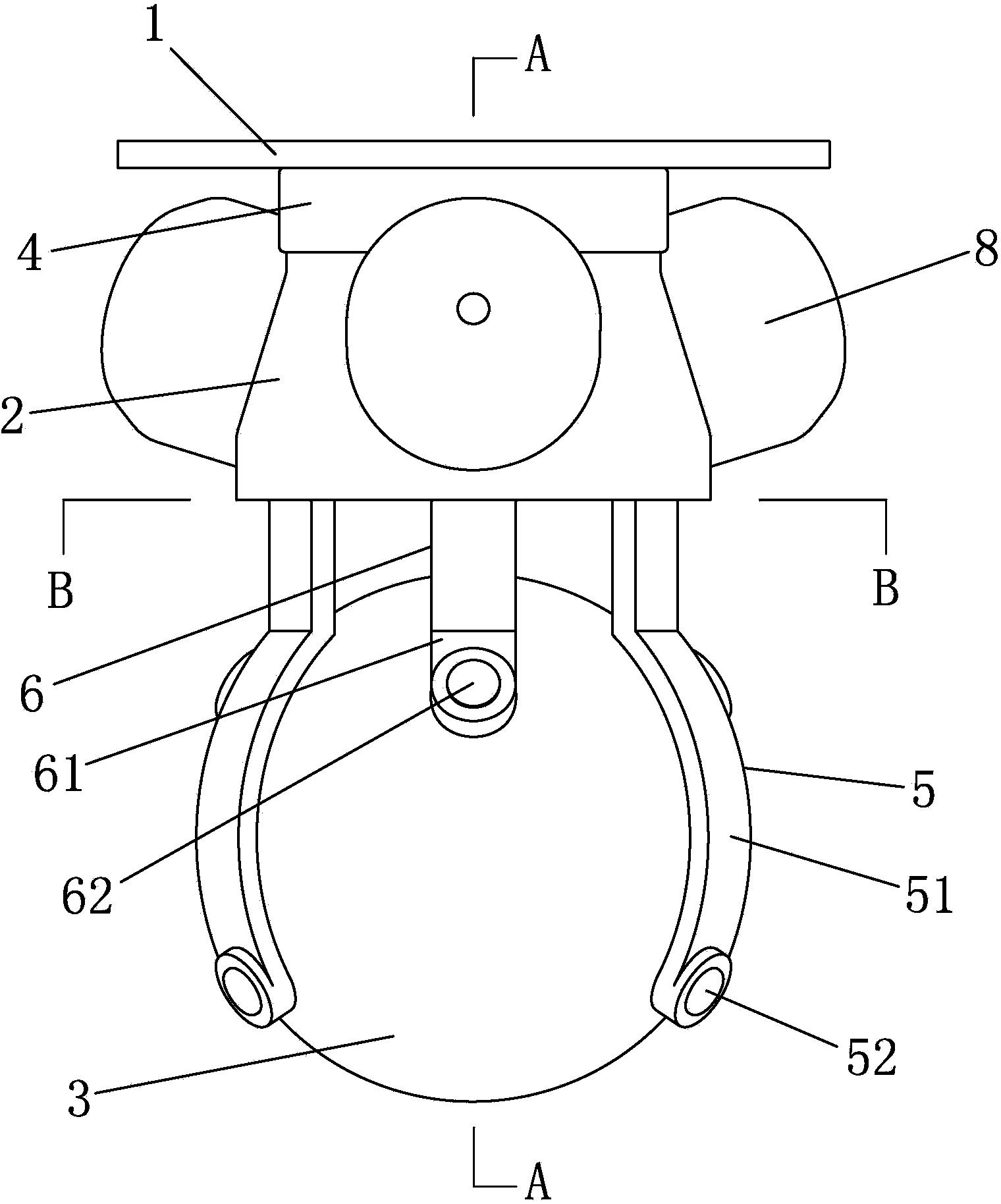
[0082] Such as Figures 1 to 7 As shown, a load-carrying robot driven by an inertia wheel includes a load-carrying platform 1, a fixed frame 2, a sphere 3, a support frame and a main controller cabin 4; the load-carrying platform 1 passes through the The main controller compartment 4 is fixedly arranged on the top surface of the fixed frame 2; the fixed frame 2 is arranged above the surface of the sphere 3 through a support frame;
[0083] The inner space of the support frame constitutes a confinement chamber, the sphere 3 is rotatably arranged in the confinement chamber, and the lower end of the sphere 3 is exposed outside the confinement chamber; the bottom end of the sphere 3 is in contact with the ground, and the sphere 3 is Constrained in the confinement chamber, the sphere 3 itself can freely rotate in any direction and cannot move in translation.
[0084]Described support frame comprises three long support frames 5 and three short support frames 6; Fixed connection, t...
Embodiment 2
[0095] Such as Figures 8 to 11 As shown, the difference between this embodiment and Embodiment 1 is that the support frame includes three long support frames 5 and one short support frame 6; the three long support frames 5 are evenly arranged along the circumference of the fixed frame 2, and the three long support frames The frame body of the support frame 5 is provided with a first bending portion 51 matching the curvature of the surface of the sphere 3, and the first bending portion 51 is provided with a first universal ball 52, and the first universal ball The spherical surface of the ball 52 is in contact with the spherical surface of the lower half of the spherical body 3;
[0096] The upper end of the short support frame 6 is affixed to the fixed frame 2, and the lower end of the short support frame 6 is provided with a second universal ball 62, and the spherical surface of the second universal ball 62 is connected to the top of the sphere 3. contact with the surface o...
Embodiment 3
[0101] Such as Figures 12 to 15 As shown, the difference between this embodiment and Embodiment 1 or 2 is that the support frame includes three long support frames 5; the three long support frames 5 are evenly arranged along the circumference of the fixed frame, and the frames of the three long support frames 5 The body is provided with a first bending portion 51 matching the curvature of the surface of the sphere 3, and the first bending portion 51 is provided with a first universal ball 52, and the spherical surface of the first universal ball 52 is in line with the The surface of the lower half of the sphere 3 is in contact with the surface; the bottom surface of the fixed frame 2 is provided with a second universal ball 62 , and the spherical surface of the second universal ball 62 is in contact with the top surface of the sphere 3 .
[0102] The point where the first universal ball 52 on the long support frame 5 contacts with the sphere 3 and the central axis 9 of the lo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



