

Snake-like robot based on orthogonal joints and spiral climbing movement controlling method for snake-like robot
A snake-like robot and motion control technology, applied in the fields of motor vehicles, transportation and packaging, etc., can solve the problems of flexibility and poor practicability, and achieve the effect of good practicability and high flexibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be described in further detail below in conjunction with the accompanying drawings.
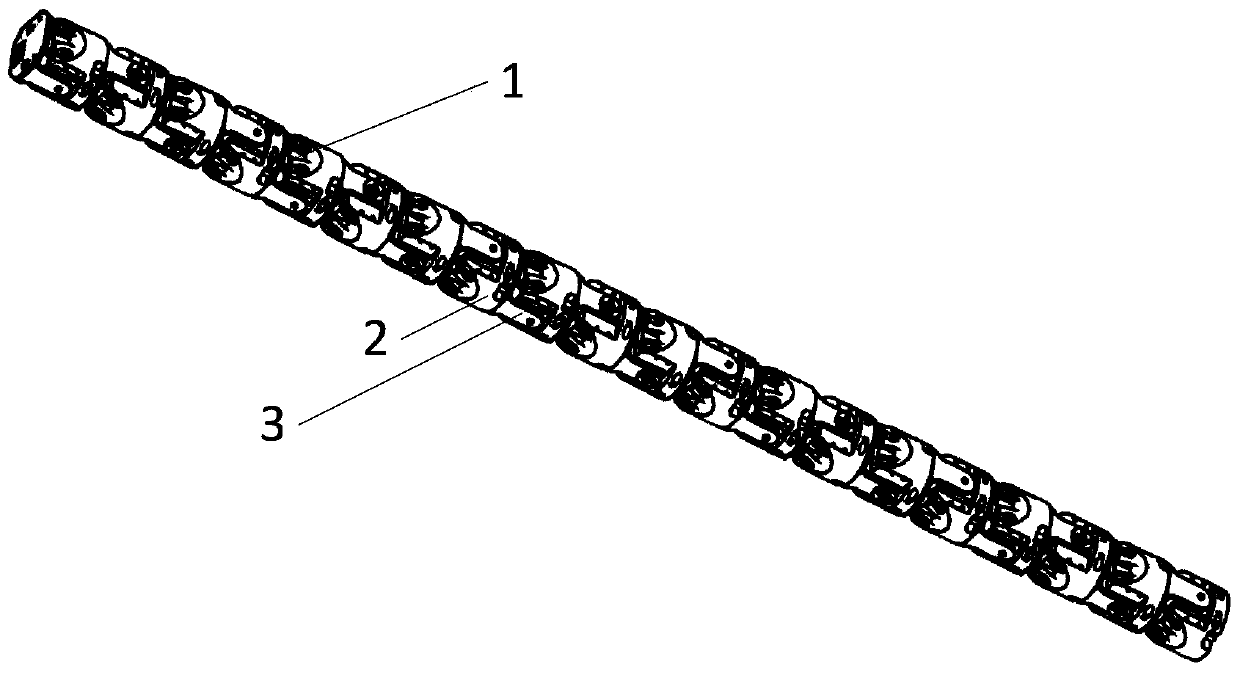
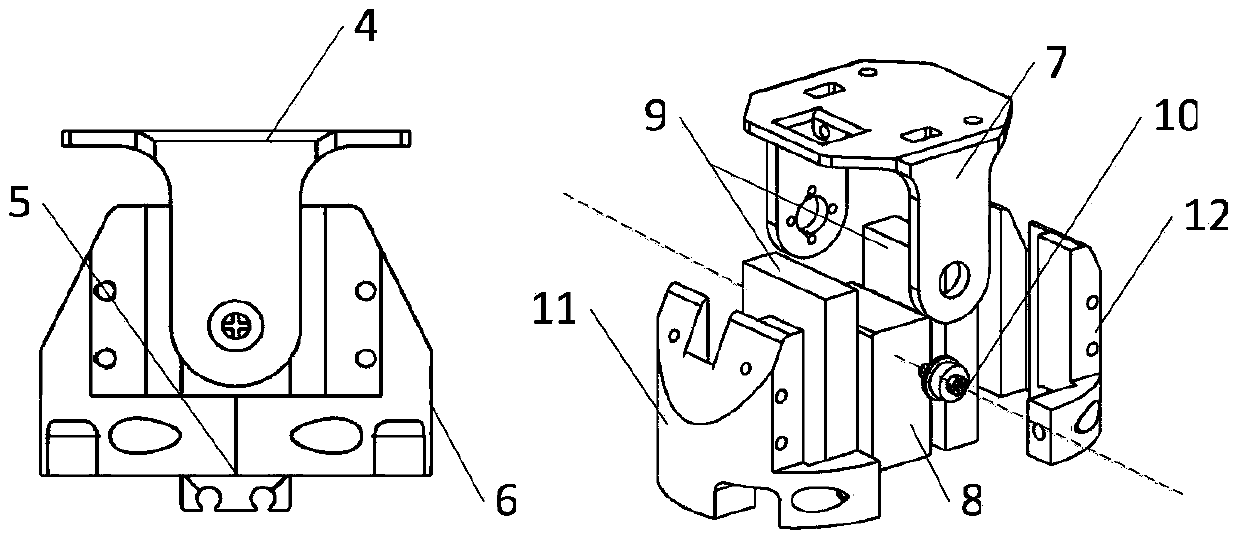
[0026] like figure 1 , figure 2 As shown, a snake-like robot based on orthogonal joints, the snake-like robot with orthogonal joints includes a plurality of joint modules 1 of the same structure, the joint modules 1 are divided into a headstock 4 and a tailstock 5, and the joint modules The headstock 4 is composed of a U-shaped connecting rod 7, the joint module tailstock 5 is composed of a driver 8, a battery 9 and a protective casing 6, and the joint module headstock U-shaped connecting rod 7 is connected to the joint module tail through a matching hole. The drive shaft 10 of the seat driver 8, the battery 9 supplies power to the driver 8, the protective shell 6 is formed by connecting the left half shell 11 and the right half shell 12 through matching holes, and the main body of the orthogonal joint snake robot is composed of multiple Two joint modules ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More