

Intelligent tour guide realizing method and intelligent tour guide device based on mobile network and mobile client
A mobile Internet and smart tour guide technology, applied in the field of smart tourism, can solve the problems of low positioning accuracy and reliability, easy damage, high price, etc., to improve the experience and experience of time and space, easy to use, and reduce costs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] All features disclosed in this specification, or steps in all methods or processes disclosed, may be combined in any manner, except for mutually exclusive features and / or steps.
[0056] Any feature disclosed in this specification, unless specifically stated, can be replaced by other alternative features that are equivalent or have similar purposes. That is, unless expressly stated otherwise, each feature is one example only of a series of equivalent or similar features.
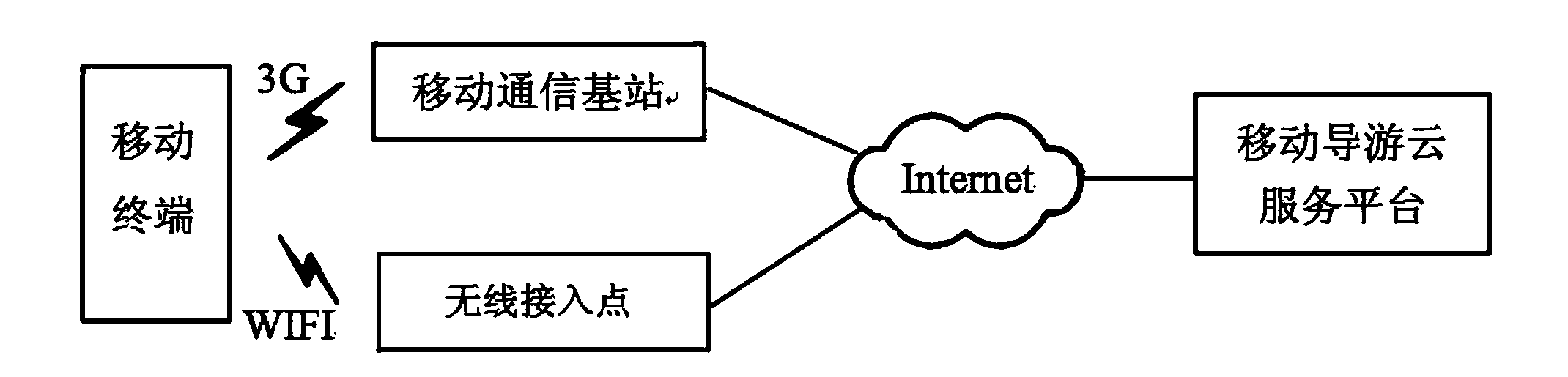
[0057] Such as figure 1 , the mobile Internet-based intelligent tour guide device in the present invention includes a mobile client module and a tour guide service module;
[0058] The mobile client module is installed on a mobile terminal, such as a smart phone, a notebook computer and a tablet computer, and is used to control the mobile terminal to collect location information of a scenic spot, and then pass through a mobile network, such as a 3G wireless network or a wifi wireless network, to view t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More