

Simultaneous localization and mapping method based on distributed edge unscented particle filter
A particle filtering and synchronous positioning technology, used in mapping and navigation, measuring devices, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
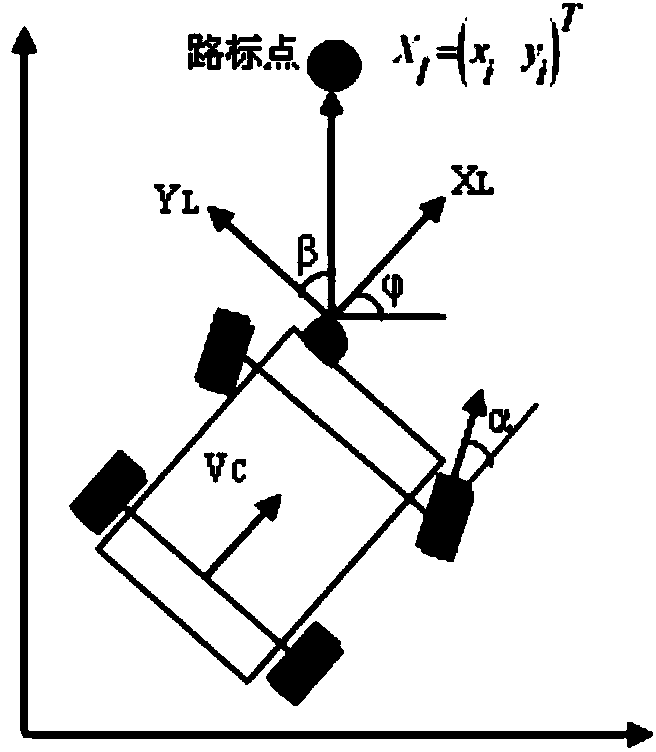
[0063] 1. System model
[0064] Establish the coordinate system, the robot motion model and the state model of the landmark point are established in the robot coordinate system, the observation model of the landmark point is established in the sensor coordinate system, and the vehicle robot coordinate system is as follows: image 3 shown. From the perspective of probability, in the SLAM problem, the motion state of the mobile robot at time k can be determined by the motion state of the robot at time k-1. Assuming that the landmarks in the environment are stationary, the following robot motion model can be established:
[0065]
[0066] in, and are the position changes of the robot in the x-direction and y-direction and the robot angle changes between the two moments before and after, respectively, and α is the change of the robot angle between the two moments before and after, is the robot angle value at the present moment calculated according to the angle change amo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More