

All-wheel-drive squirming-type pipe robot
A pipe robot and threaded pipe technology, which is applied in the direction of special pipes, pipe components, mechanical equipment, etc., can solve the problem of independent power supply for movement and locking, and achieve the effects of reducing power sources, reducing energy consumption, and reducing volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments, which are preferred implementations with the same principle as the present invention.
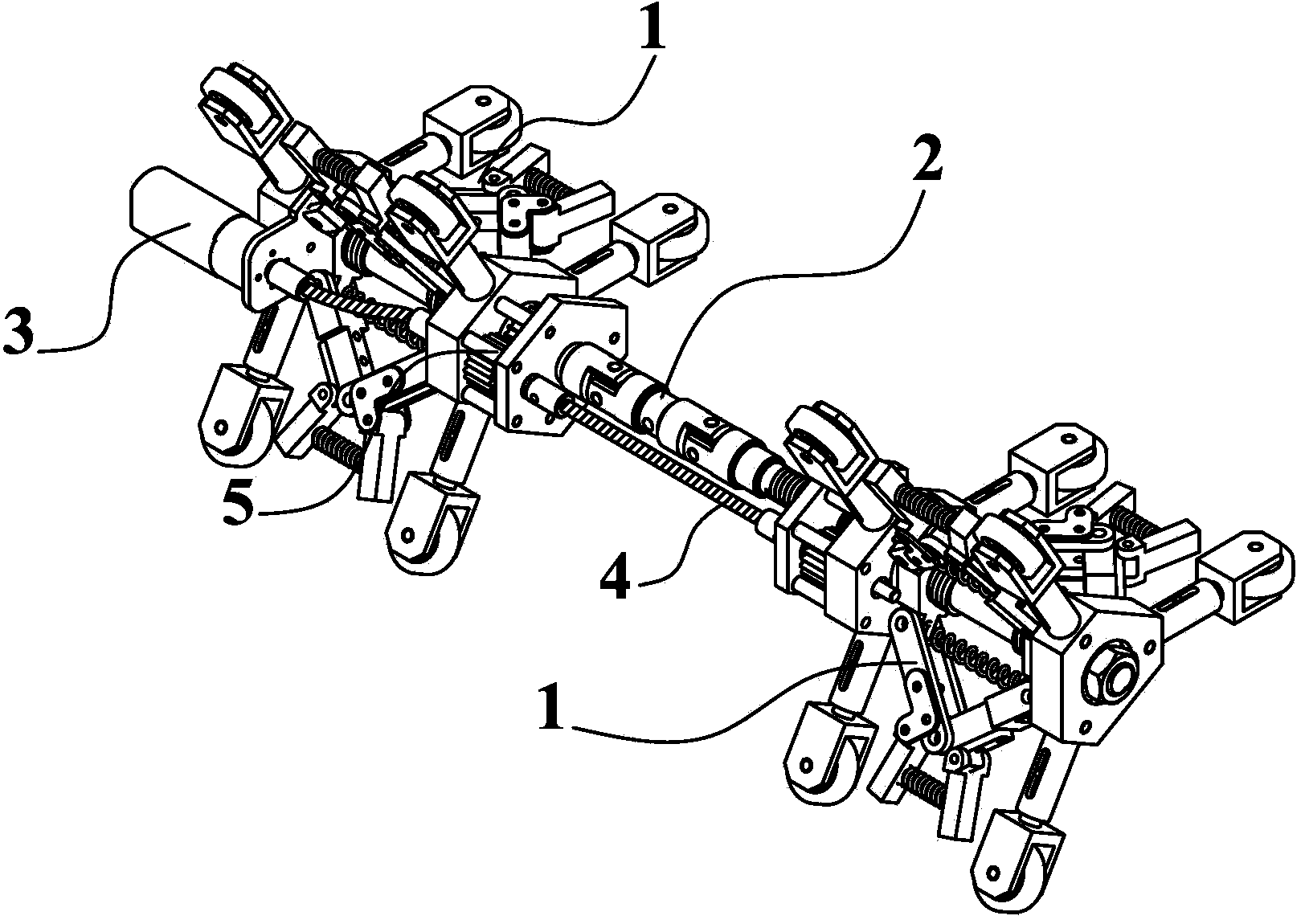
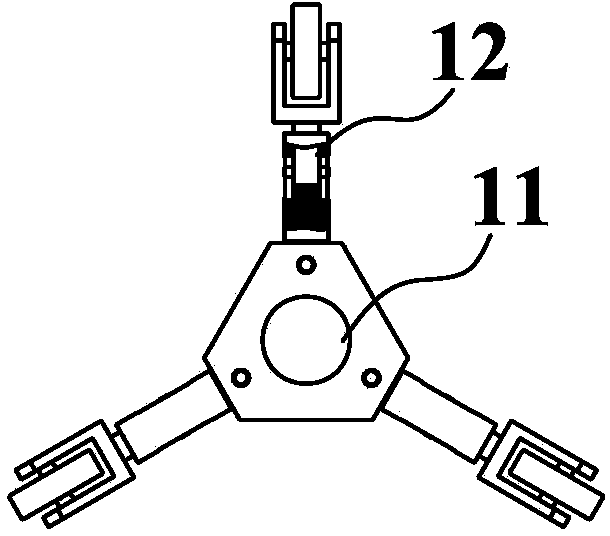
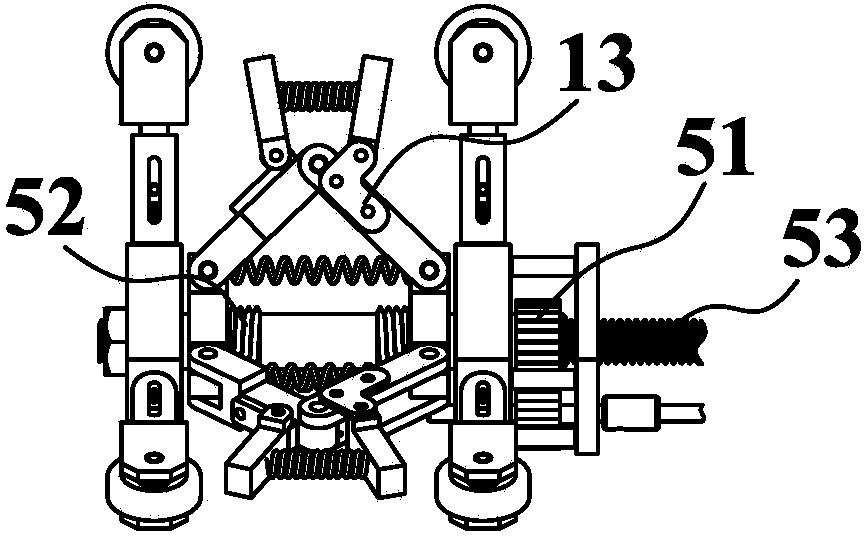
[0023] Such as Figure 1 to Figure 5 As shown, the full-drive peristaltic pipeline robot of this embodiment includes a unit section 1 and a universal joint 2 connecting the unit sections. The unit section specifically includes a mounting frame 11 , a wheel leg assembly 12 , a locking assembly 13 and a transmission assembly 5 . The wheel leg assembly, locking assembly and transmission assembly are installed on the mounting frame, wherein the wheel leg assembly is used to support the robot to walk on the inner wall of the pipeline, the locking assembly is used to lock the unit section, and the transmission assembly is used to drive the locking assembly according to the drive motor 3 Actions and unit sections move relative to each other, that is, peristaltic mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More