

Ship dynamic positioning system and design method thereof
A technology for dynamic positioning systems and ships, applied in general control systems, control/regulation systems, instruments, etc., can solve problems such as increasing the difficulty of engineering implementation, the inability to guarantee the relative position accuracy of individual ships, and the dispersion of control information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
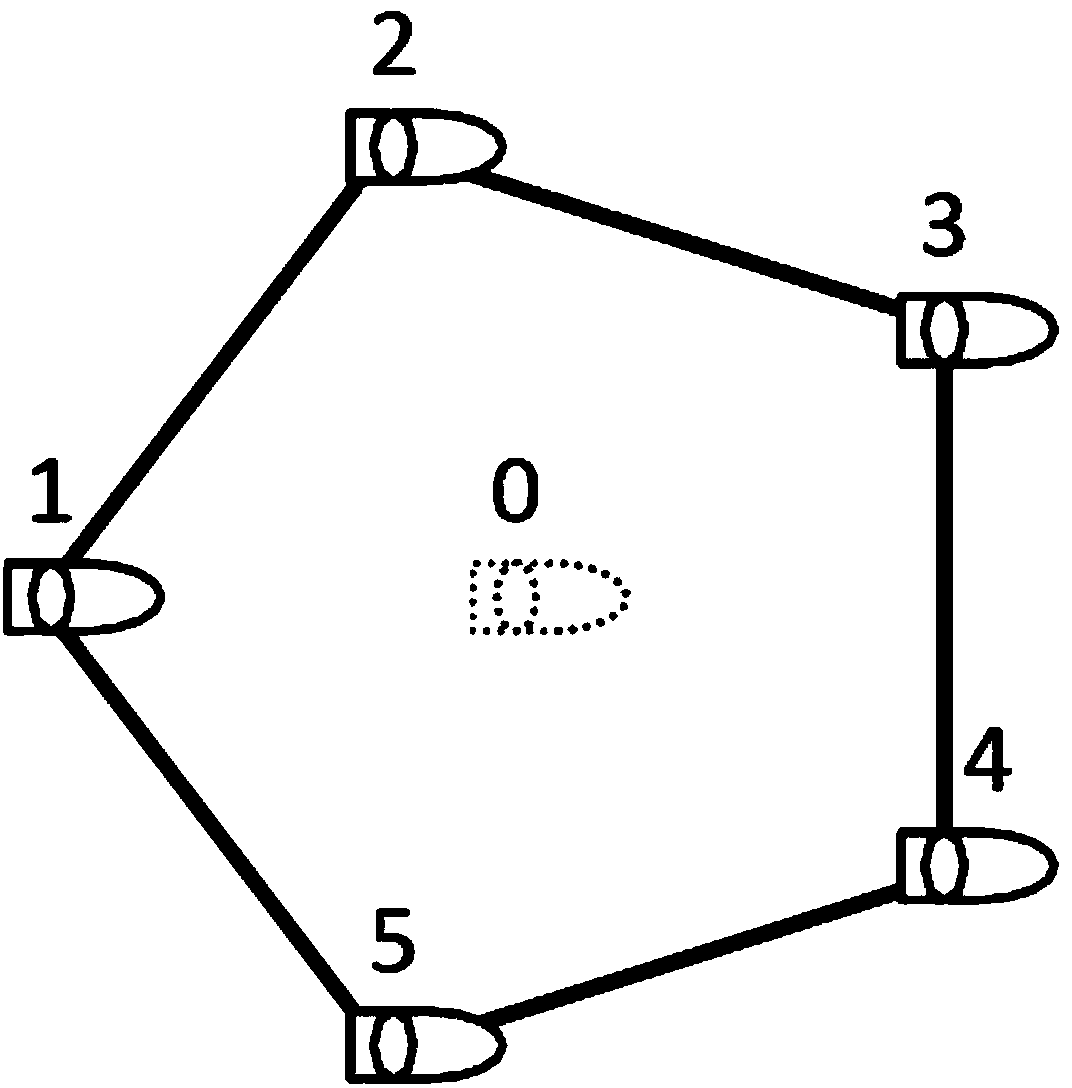
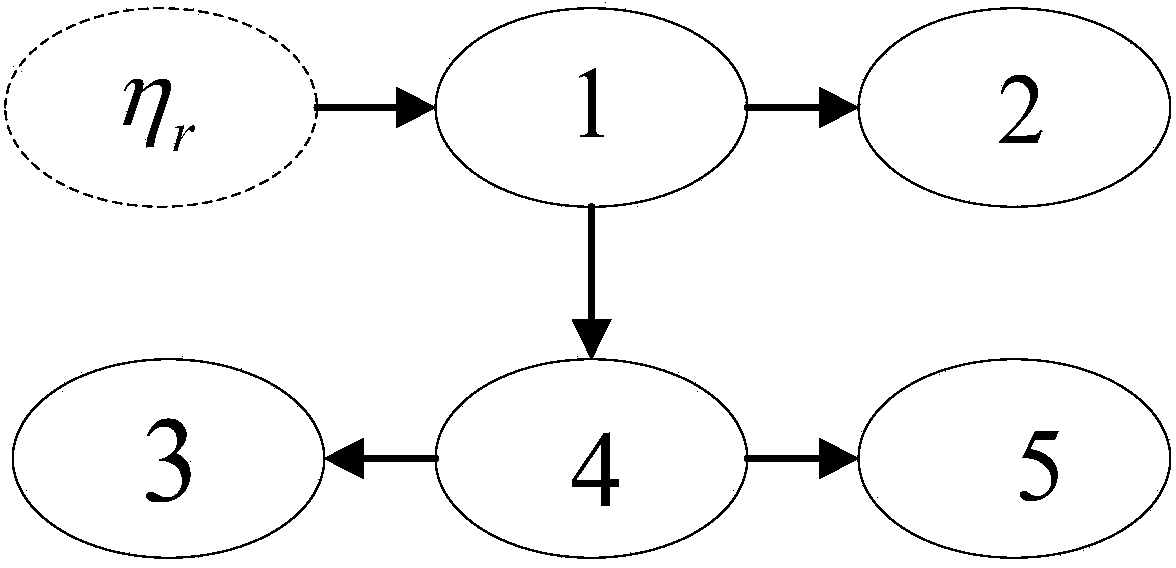
[0062] The present invention will be further described below in conjunction with the accompanying drawings. The present invention will be further described below by taking a specific five-ship ship system as an example. Each ship in the system satisfies the motion model shown in formula (1), and the specific parameters of the ship model are as follows:
[0063] M = 25.8 0 0 0 33.8 1.0948 0 1.0948 2.76 , f ( v i ) = - 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More