

Multi-dimensional expansion robot
A robot, multi-dimensional technology, applied in the directions of manipulators, conveyor objects, transportation and packaging, etc., can solve the problems of small space operation range, high space occupancy rate, small carrying capacity, etc., to widen the working range and low space occupancy rate. , reliable operation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The specific structure of the present invention is further described below:
[0026] Explain the structural installation relationship and function of each component of the patent of the present invention:
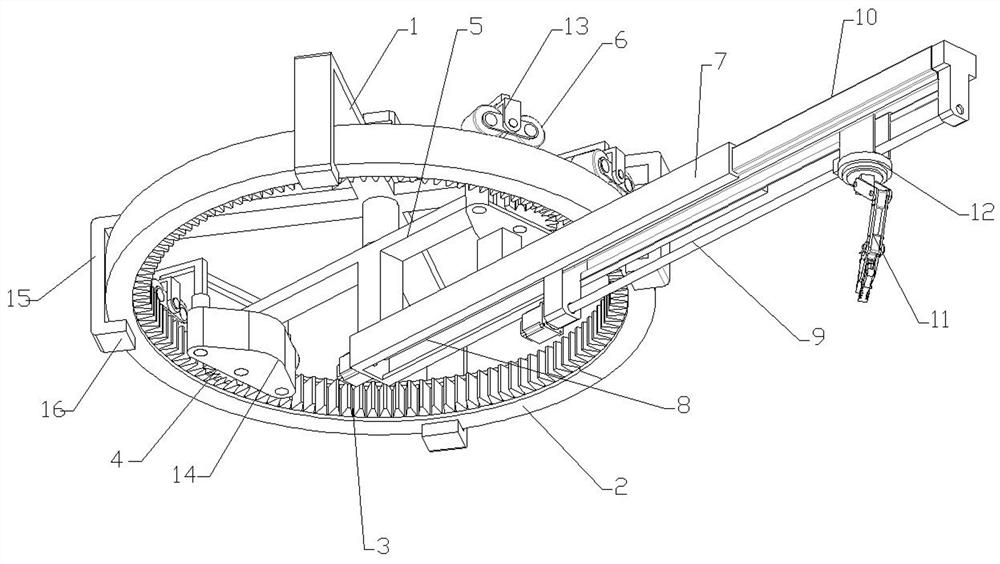
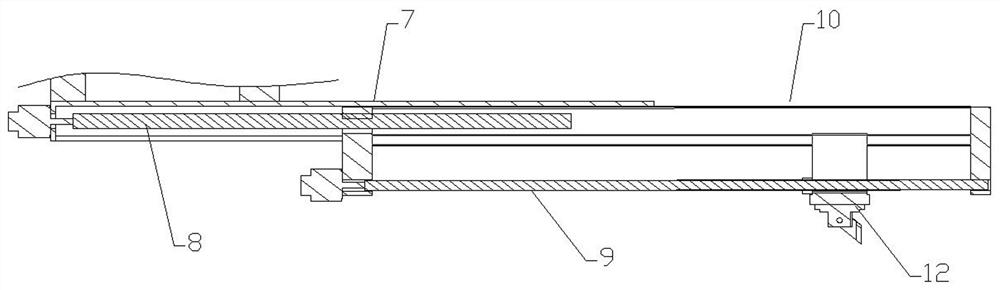
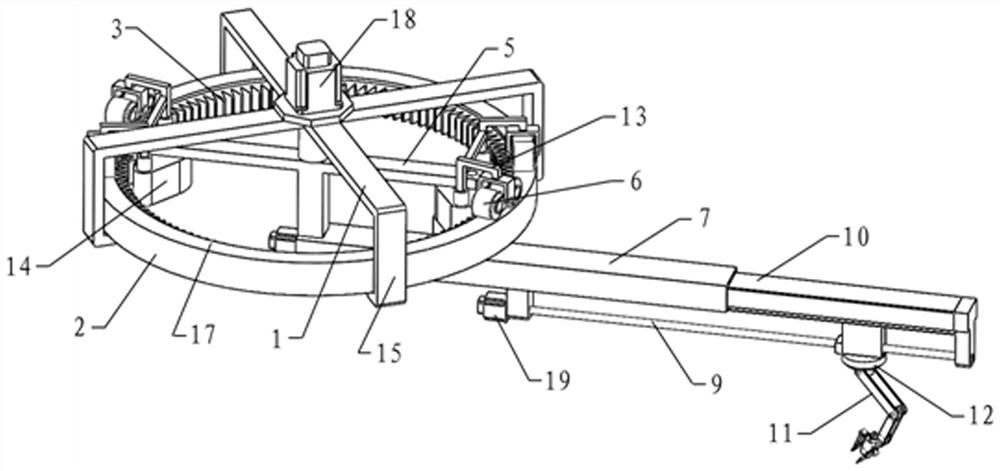
[0027] The device includes a hoisting installation frame, a circular track, a circular driving device, a linear extension mechanism, a linear movement mechanism and an end effector.
[0028] Hoisting installation frame: The hoisting installation frame is used for the installation and fixing of multi-dimensional expansion robots, and is fixed above the interior of the factory building or on the top of the open-air hoisting bracket by means of hoisting installation. In the present invention, the hoisting installation frame is a cross, and the four ends of the cross extend downwards from the hanging plate, and the bottom of the hanging plate stretches out the supporting plate to support the bottom of the circular track and fix it.
[0029] The circular track is a ring-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More