

An Optimal Design Method for Mechatronic Control Integration
An optimized design, electromechanical technology, applied in the field of mechanical processing, can solve the problems of time-consuming and laborious, and achieve the effect of improving efficiency, good energy and good utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] The present invention will be described in detail below in conjunction with the accompanying drawings.
[0016] refer to figure 1 , the present invention comprises the following steps:
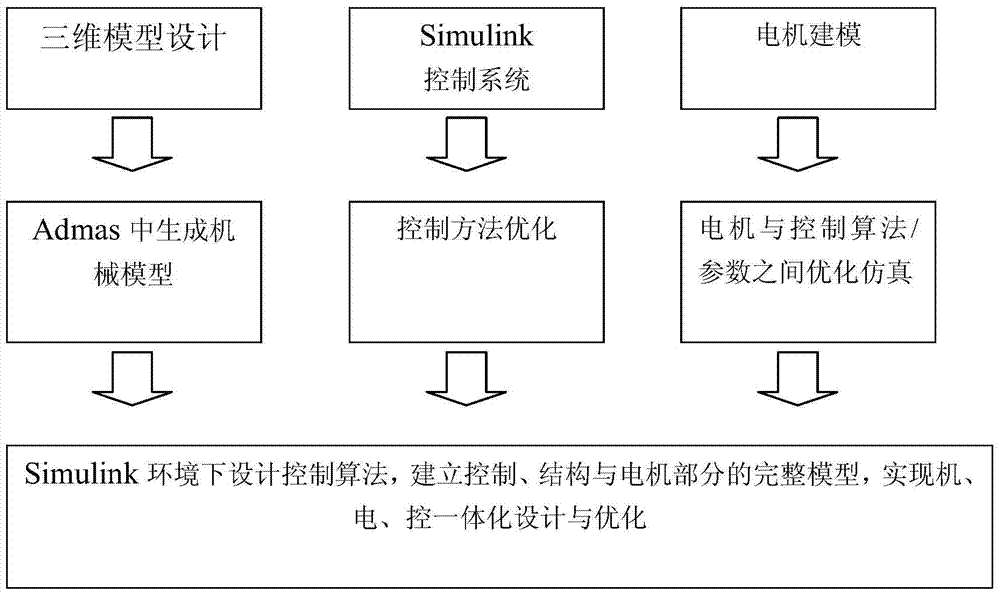
[0017] 1) First establish the electromechanical control model including mechanical structure model, motor model and control system model; establish the joint optimization method of mechanical structure physical parameters and control algorithm: firstly design the 3D model through Pro / E, Solidworks or other three-dimensional modeling software Then import the 3D model into the dynamics simulation software Adams, add constraints and drives to become a visualized multi-body dynamics model, and then import the model into Simulink to establish a mechanical mechanism model and a control system model; Simultaneously use Simulink Design the control algorithm and build the motor model.
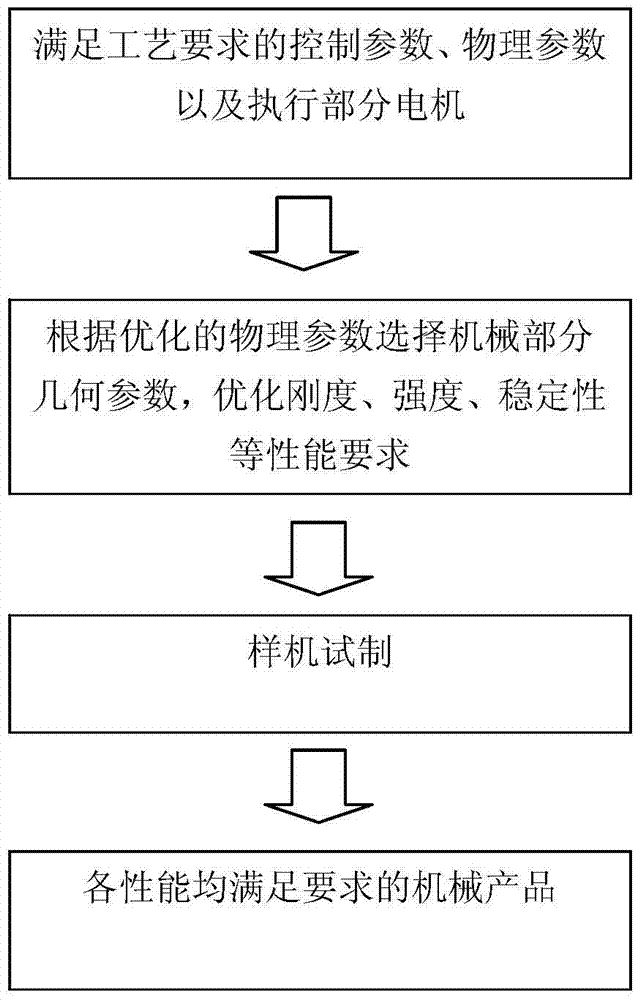
[0018] 2) Then optimize each physical parameter of the mechanical structure model and the control algorithm ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More