

Octopus tentacle imitating adaptive capture soft manipulator and capture method thereof
An adaptable and manipulator technology, applied in the field of robotic hands, can solve the problems of complex mechanical structures of bionic triangular grippers and human-like end effectors, and difficulty in manufacturing the microstructure of nano-force grippers, and achieve strong fault tolerance and anti-destructive ability. , the effect of strong anti-wear ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
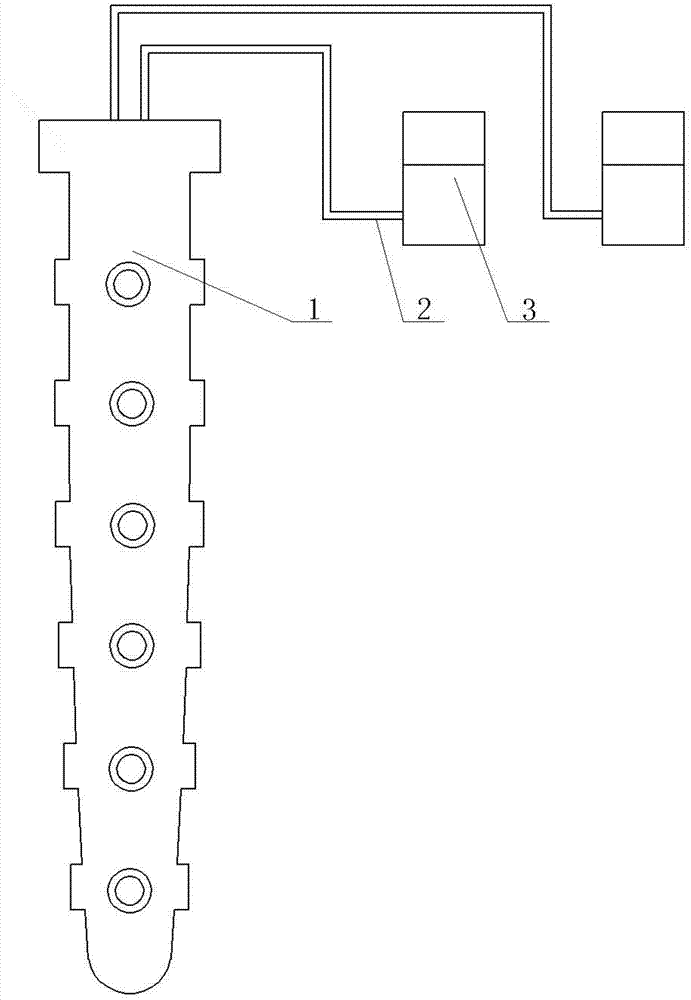
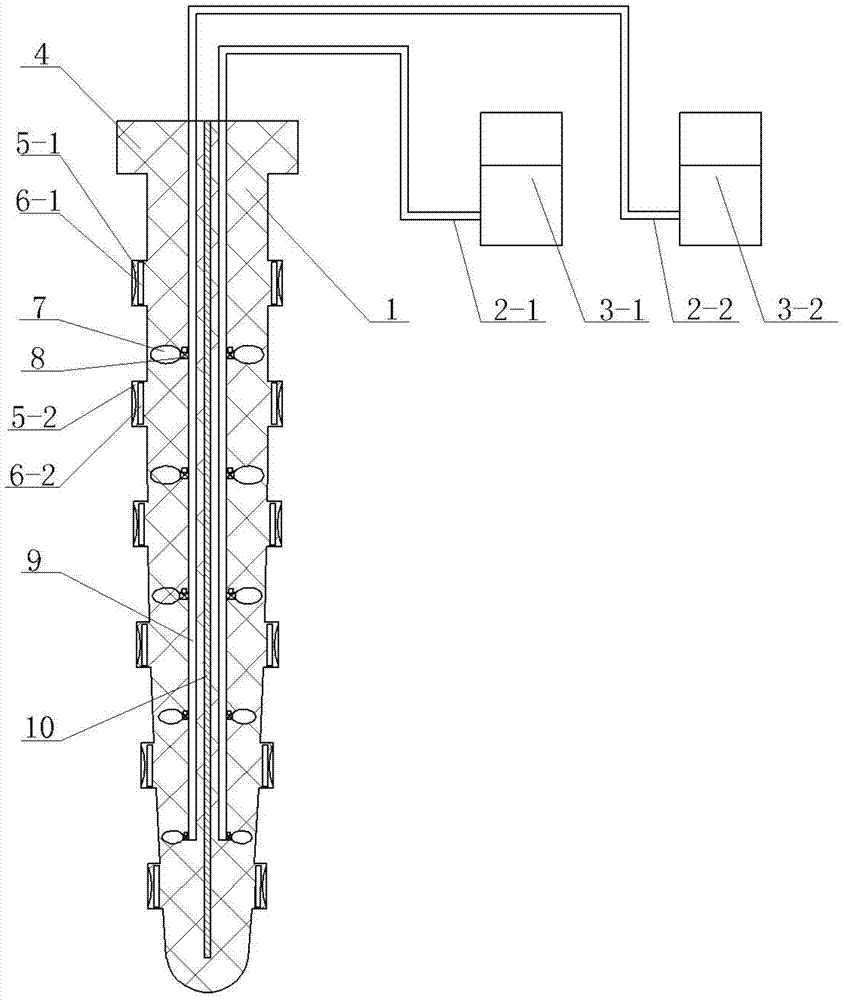
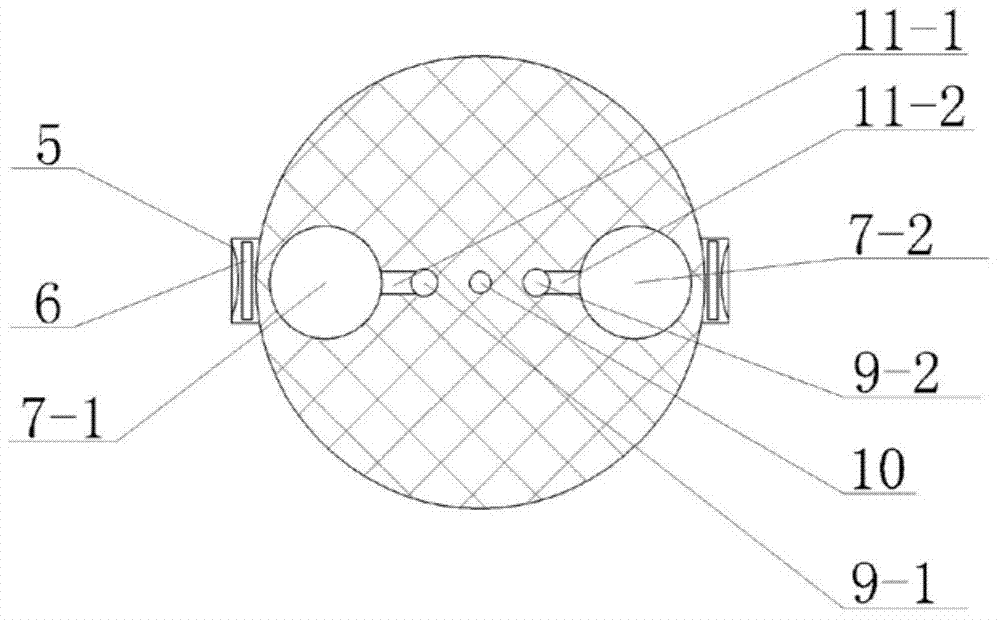
[0025] The present invention is an adaptive grasping soft manipulator imitating octopus tentacles, comprising tentacles 1, air pipes 2, electrical proportional valves 3, strain gauges 6, and electromagnetic valves 8. The tentacle 1 imitates the shape of the octopus tentacle, and becomes irregularly long and conical. The end of the tentacle has a tentacle protrusion 4 with a larger diameter, which is convenient for loading. Groups of ellipsoidal pressure-regulating cavities 7 are uniformly distributed inside the tentacles 1 on concentric circles with a smaller radius than the radial section. The grouped ellipsoidal pressure regulating cavities 7 inside the tentacle 1 are evenly distributed along the axis of the tentacle. The long axis of the ellipsoidal pressure regulating cavity 7 is along the radial direction of the tentacle 1, and the short axis is along the axial direction of the tentacle 1. Inside the tentacle 1, there are main air passages 9 arranged along its axial dire...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More