

Kinematics based patrol unit gear train coordinating and controlling method
A technology of coordinated control and patrol, which is applied in the field of coordinated control of wheel trains of roaming vehicles, and can solve problems such as the uncertainty of patrol movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention will be further described in detail below in conjunction with the drawings and specific embodiments:
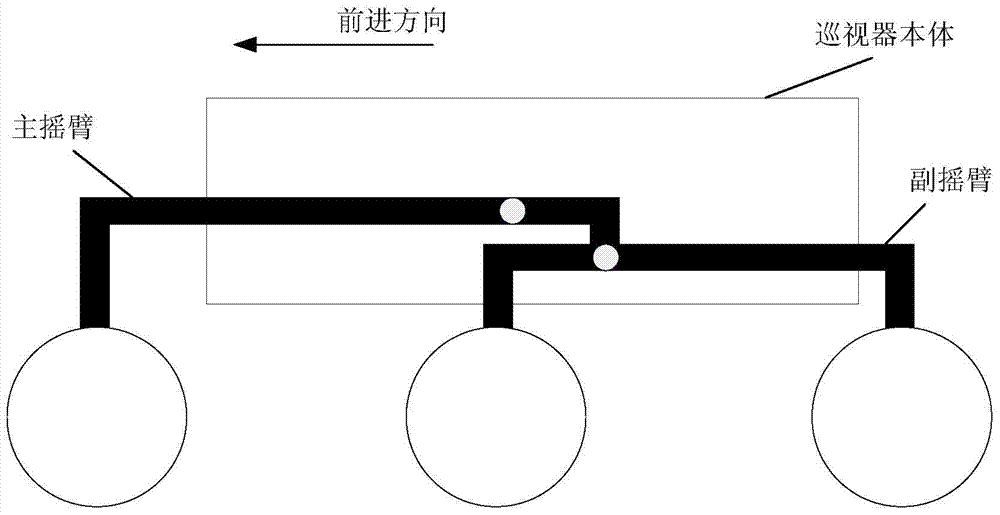
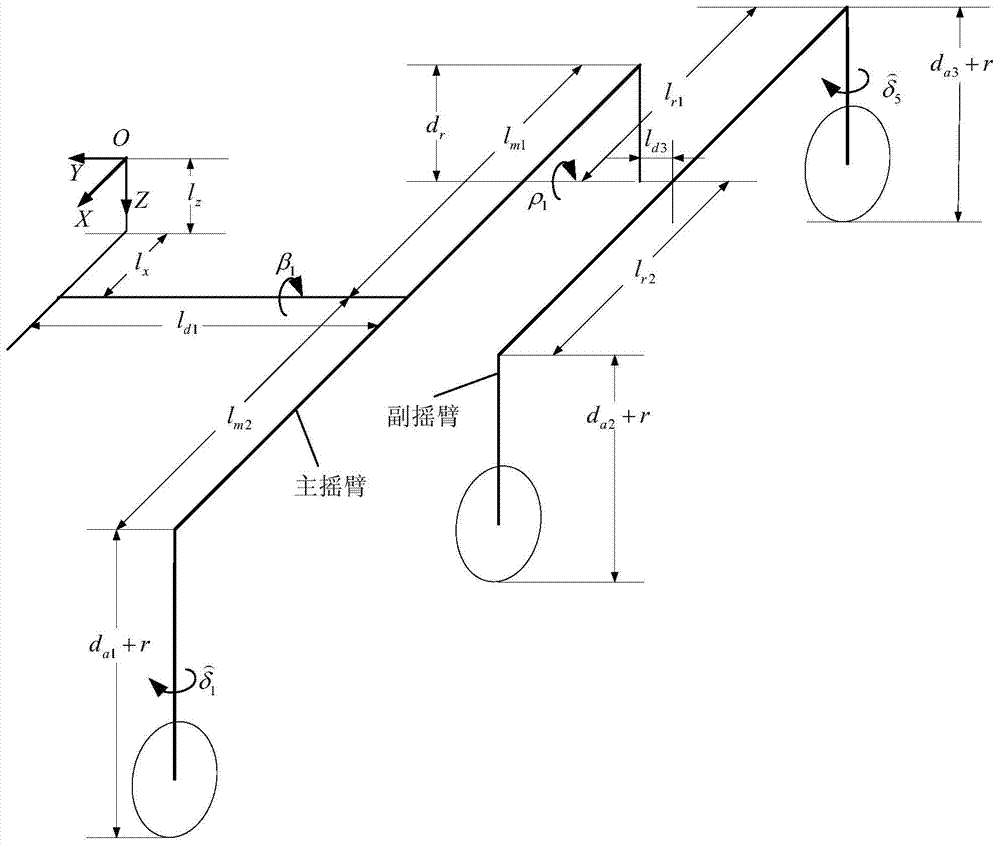
[0058] The patrol device has a four-wheel steering and six-wheel drive rocker arm suspension chassis structure, which can passively adapt to natural undulating terrain, so it belongs to a wheeled mobile robot with non-holonomic constraints. The patrol wheel train of the present invention includes six wheels: two front wheels, two rear wheels and two middle wheels. The two front wheels and the two rear wheels have steering capability, and the six wheels are on the same plane or Not on the same plane.
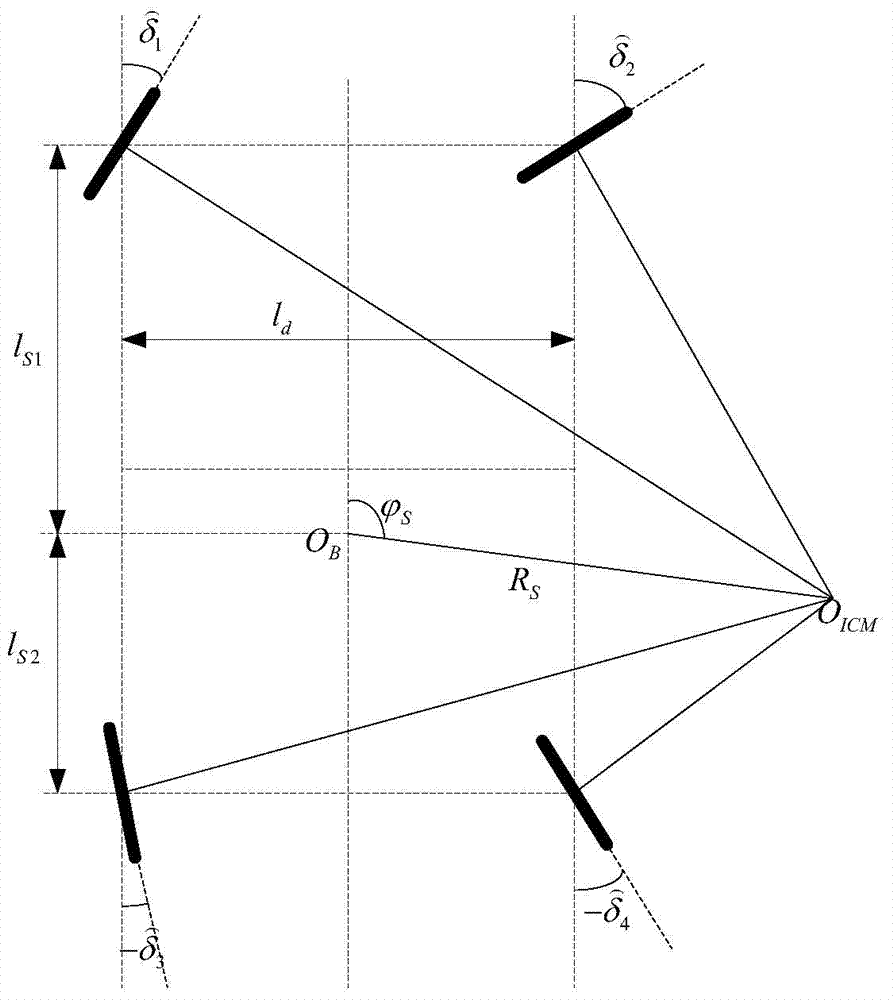
[0059] If the patrol cannot guarantee that the steering wheels are coplanar, if the wheels are not in the same plane, the steering wheel angle must be adjusted accordingly in consideration of the three-dimensional spatial relationship, so that the projection of the ideal trajectory of each wheel on the horizontal plane is at A set of concentric circles o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More