

Space teleoperation hand controller
A hand controller and remote operation technology, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of inflexible control, small working space, poor rigidity, etc., and achieve the effect of flexible control, reduced difficulty and cost, and good dynamic performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
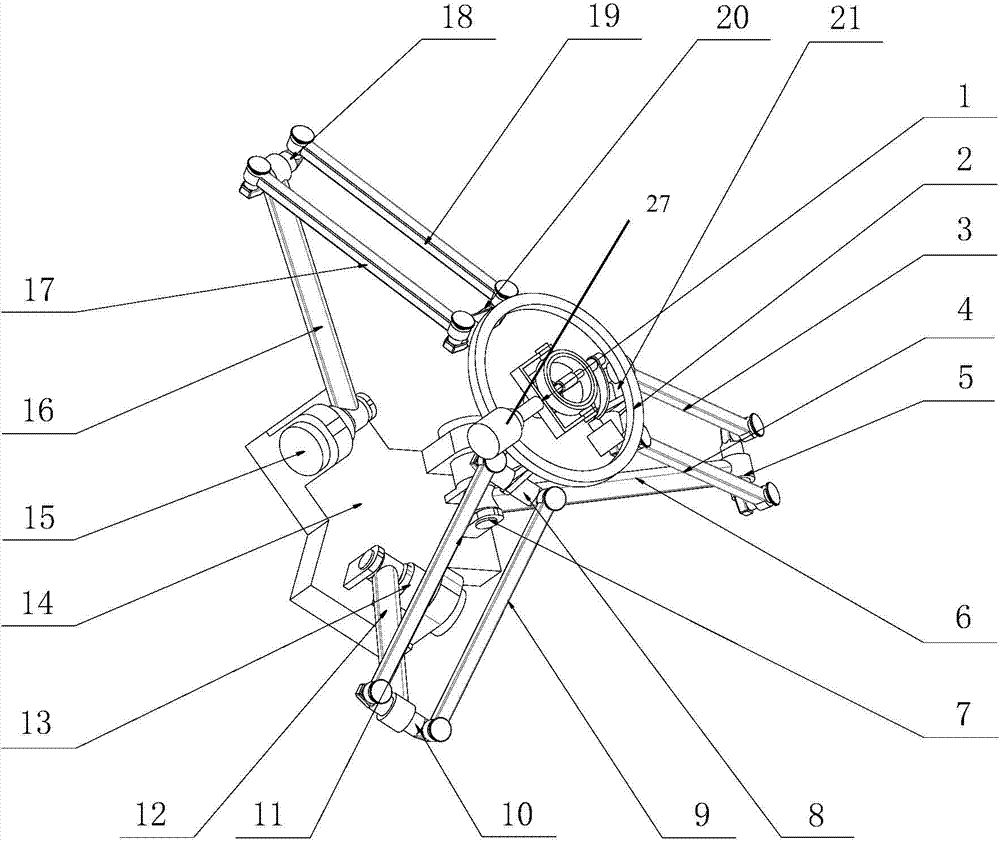
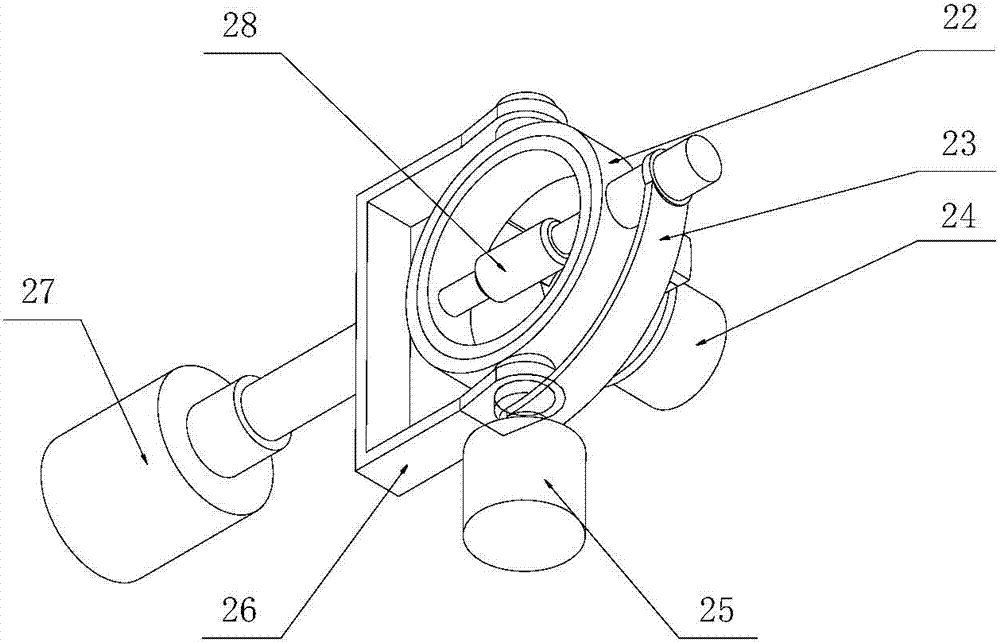
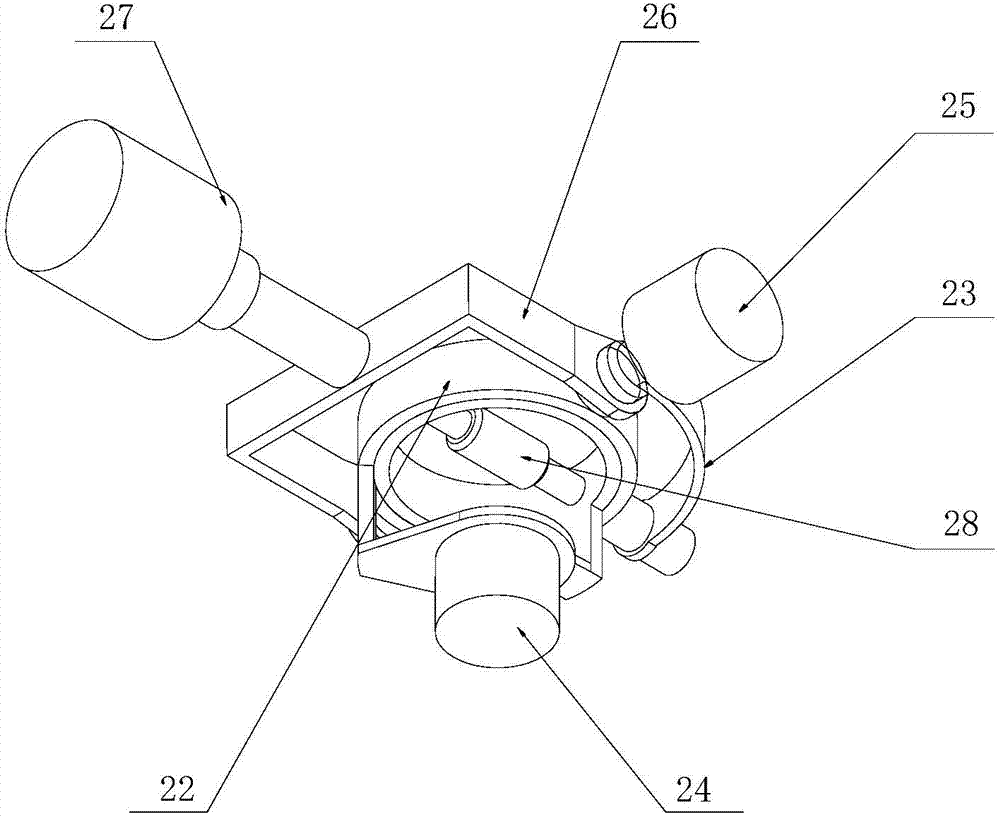
[0017] The technical solution of the embodiment of the present invention includes a translation mechanism and a rotation mechanism. The translation mechanism includes a base, a mobile platform and three branch chains, and the three branch chains are fixed on the base in the form of an equilateral triangle. The rotating mechanism is located on the upper side of the base and is fixed on the moving platform of the translation mechanism.
[0018] The translation mechanism is composed of a base, three branch chains and a mobile platform. The base includes three bumps, which are respectively equipped with motor fixing devices. The three fixing devices are equilateral triangles; the three branch chains have a complete structure. The same, including an actuator rod, two connecting rods and two rotating shafts; the actuator rod is connected to the base motor through the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More