

Obstacle avoidance and navigation method for robot based on the principle of skinner manipulative conditioning
A technology of operating conditional reflex and navigation method, which is applied in the field of obstacle avoidance navigation of mobile robots, and can solve the problem of low intelligence of robot obstacle avoidance navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] Further description will be given below in conjunction with the drawings and specific embodiments.
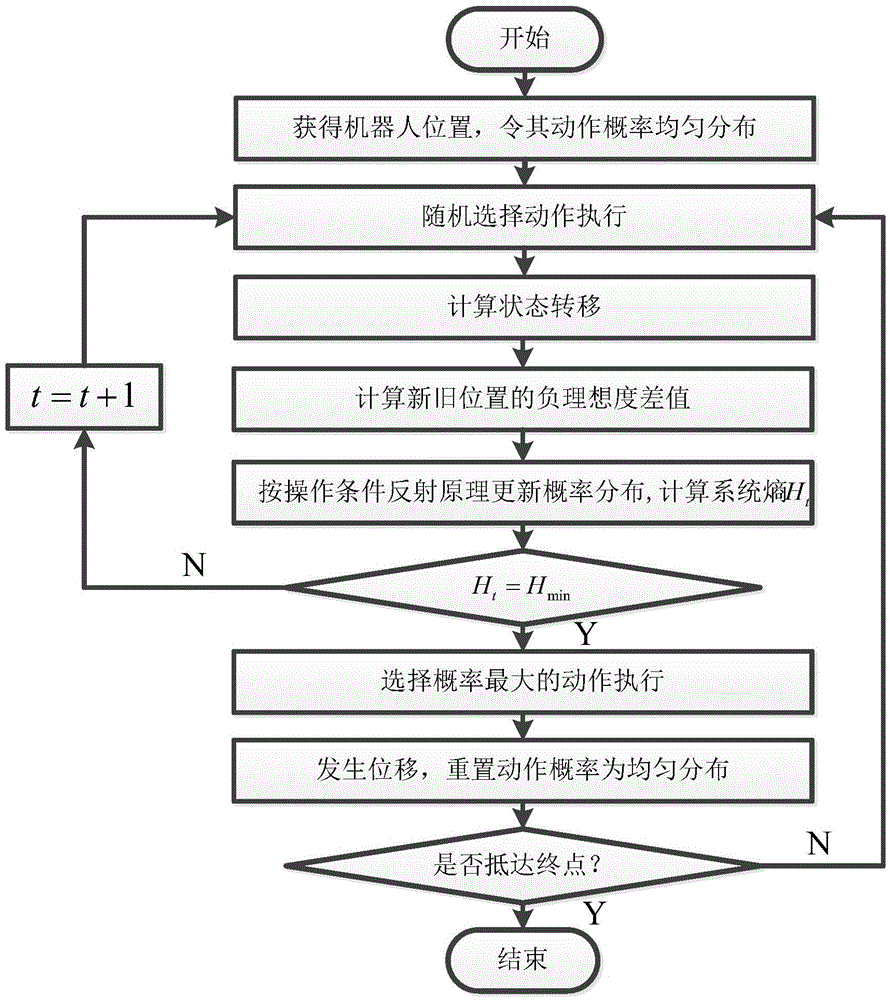
[0054] The flow chart of the method of the present invention is as follows figure 1 As shown, including the following steps:
[0055] Step 1. Let the robot start from the starting point, select the starting point coordinates as the current state of the robot, and set the robot's action set as A={a k |k=1,2,…,n a }, that is, from 1 to n a Select the corresponding angle from the sensor distribution positions to move forward, and the initial action probability distribution is uniform.
[0056] Step 2. Randomly select an action from the action set, denoted as a k .
[0057] Step 3. Calculate and execute a according to formula (1) k The position of the back robot.
[0058] Step 4. Calculate the negative ideality difference Δε according to formula (2) ij =ε j -ε i , Take w here 1 =5,w 2 =1, punishment=100000.
[0059] Step 5. According to Δε ij Calculate the orientation function value...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More