

Biomorphic wheeled robot system with simulation learning mechanism and method
A robot system and learning mechanism technology, applied in the field of intelligent robots, can solve the problems of low learning efficiency of robots, reduce the learning time, overcome the cumbersome image processing, and overcome the cumbersome process of image processing.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with accompanying drawing.
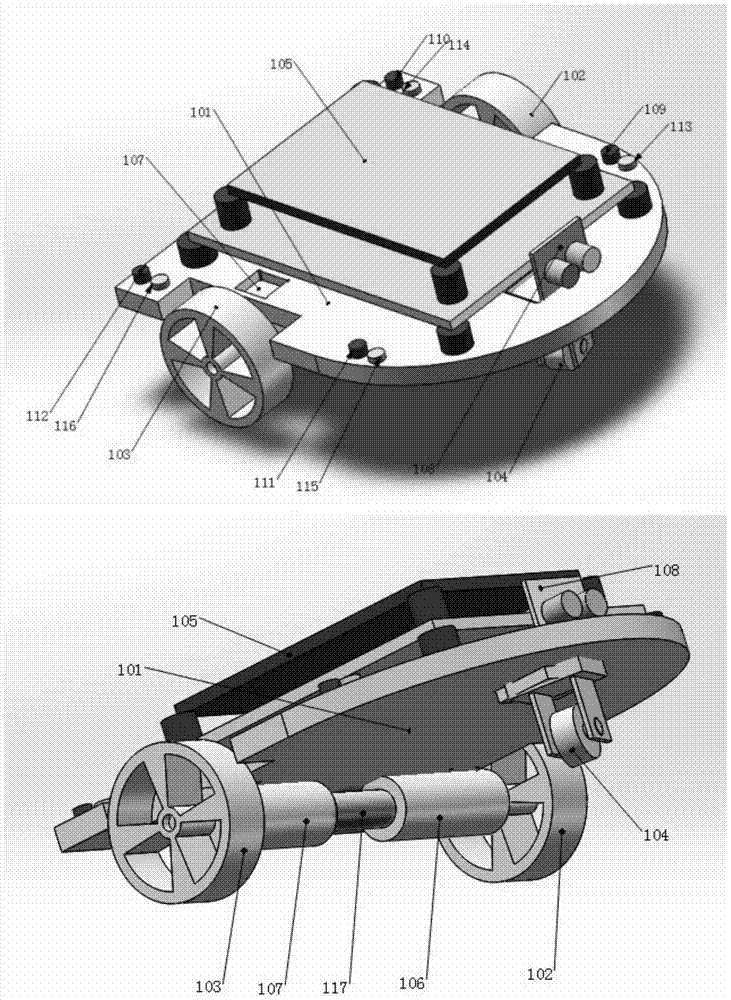
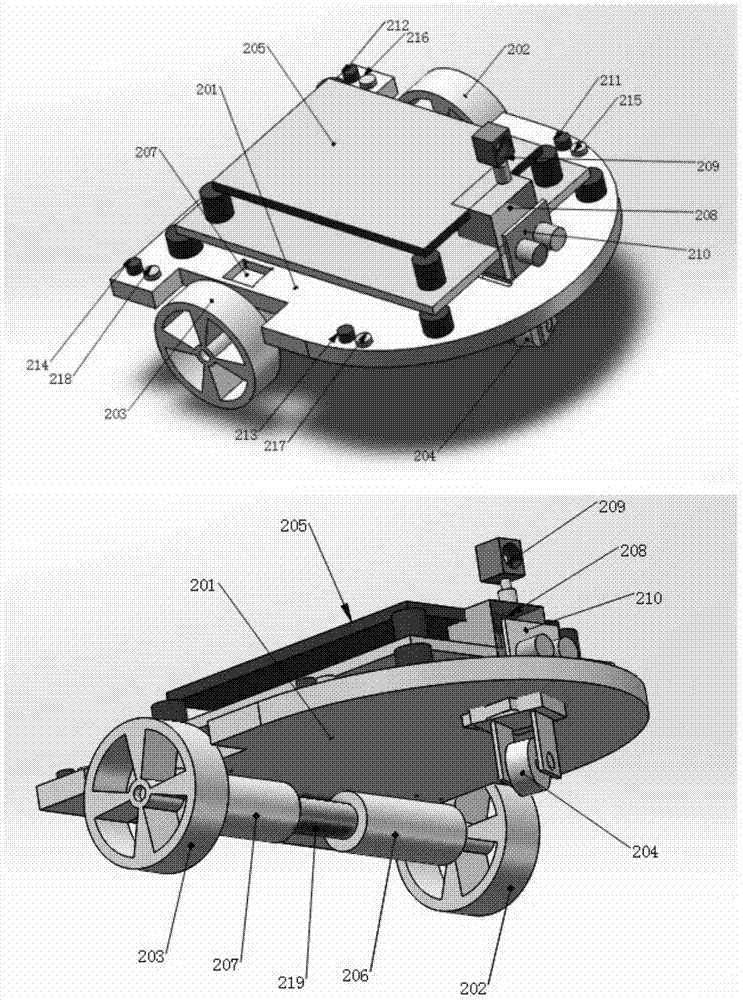
[0035] figure 1 and figure 2 They are the structure diagrams of teaching robot A and imitation robot B respectively. The mechanical structures of robots A and B are roughly the same, mainly including a main robot skeleton composed of a flat plate and a bracket, two independent left drive wheels and right drive wheels, and a follower wheel. The three wheels all use rubber tires to increase the friction with the ground during motion, making it easy to make a variety of turning actions.
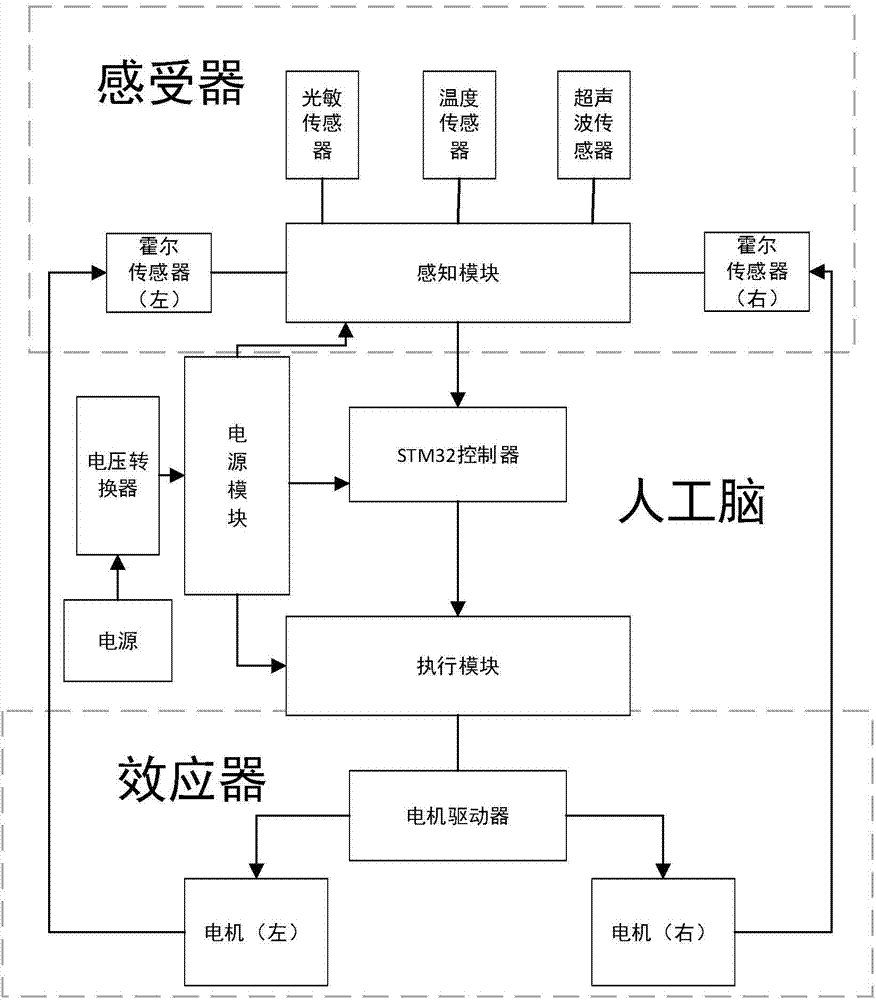
[0036] image 3 and Figure 4 The block diagrams of the control systems of robots A and B respectively. The composition of the control systems of robots A and B is basically the same, mainly including left and right DC motors, STM32 controllers and power modules, as well as ultrasonic sensors, photosensitive sensors, temperature sensors, and Hall sensors.
[0037] The STM32 controller ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More