

Robot teaching system, robot teaching assistant device and robot teaching method
A robot and teaching technology, applied in general control systems, control/regulation systems, instruments, etc., to achieve the effect of easy operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 Embodiment approach )
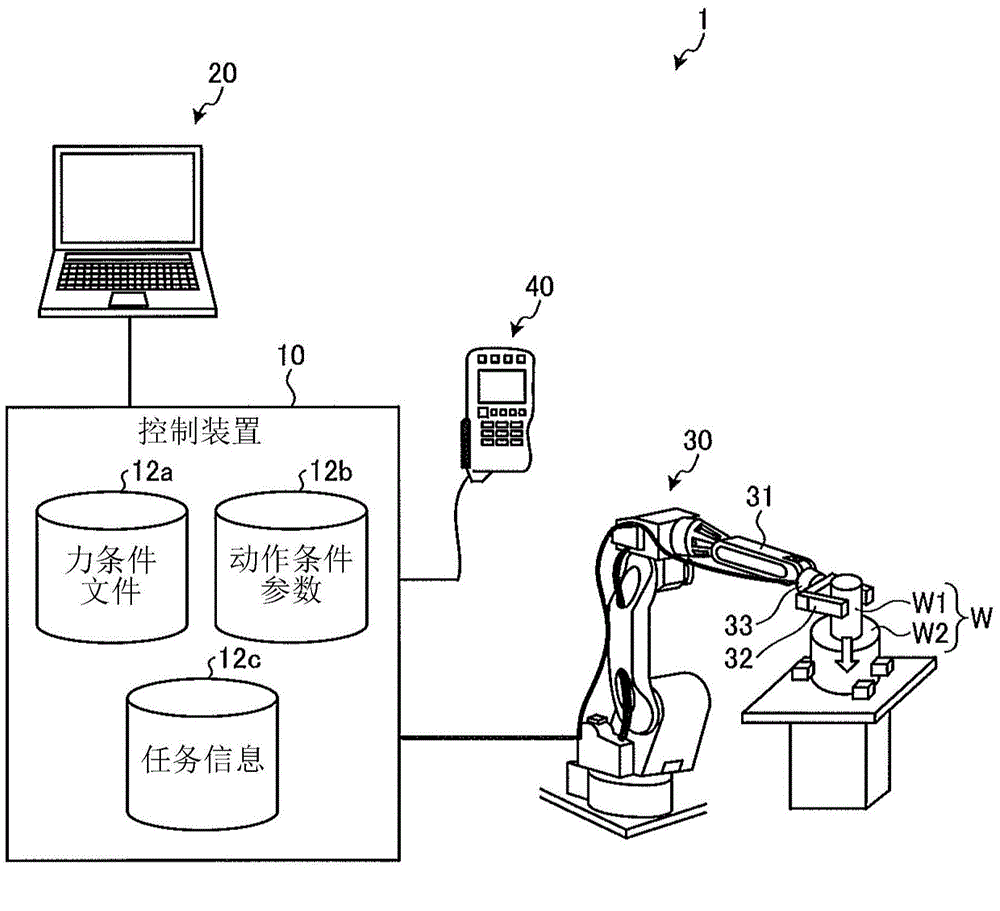
[0027] figure 1 It is a schematic diagram showing the overall configuration of the robot teaching system 1 according to the first embodiment. Such as figure 1 As shown, the robot teaching system 1 includes a control device 10 , a PC (Personal Computer: personal computer) 20 , a robot 30 , and a programmer 40 .
[0028] The control device 10 is a controller configured to include an arithmetic processing device, a storage device, and the like. Use below figure 2 The control device 10 will be described in detail.
[0029] In addition, the control device 10 is connected to various devices of the robot teaching system 1 typified by the PC 20 , the robot 30 , and the programmer 40 so that information can be transmitted. Here, the connection method is not limited. Thus, both wired and wireless connections are possible.
[0030] In addition, the control device 10 is provided with a force condition file 12a, an operation condition parameter 12b, and task information 12c. The fo...
no. 2 Embodiment approach )
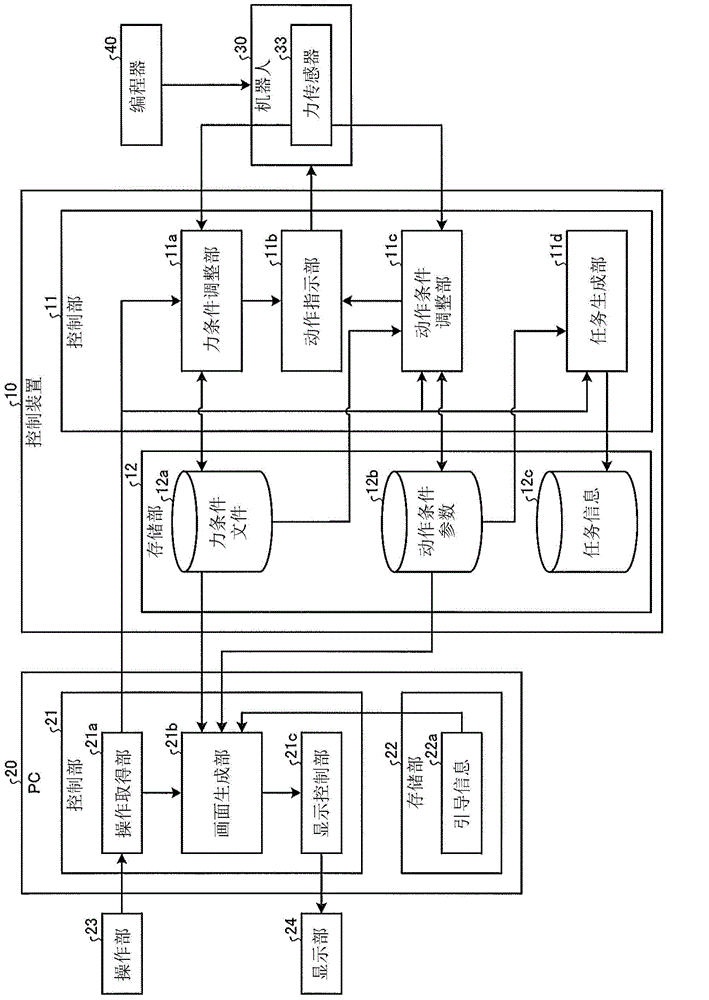
[0157] Figure 12 It is a block diagram of the robot teaching system 1' of the second embodiment. exist Figure 12 Only the components necessary for the description of the robot teaching system 1' are shown in , and the description of general components is omitted. in addition, Figure 12 With the block diagram of the first embodiment that figure 2 correspond. Therefore, the same reference numerals are assigned to the same constituent elements. In addition, the following may simplify description or omit the common points of both.
[0158] In the second embodiment, the measured value of the force sensor 33 is sent to the control device 10 and stored in the force condition file 12a, read out by the PC 20, and applied to the force condition adjustment process and the operation condition adjustment process of the PC 20.
[0159] The programmer 40 functions as a teaching device for teaching various operation modes to the robot 30 by outputting various parameters input by a t...
other Embodiment approach
[0268] Figure 14 It is a schematic diagram showing the structure of a robot teaching system 1'' of another embodiment. exist Figure 14 Only components necessary for explanation are briefly shown in .
[0269] Such as Figure 14 As shown, the process of sequentially adjusting the force condition file 12a and the action condition parameter 12b of the control device 10 and generating task information 12c based thereon has been described. Therefore, the history of this process (see closed curve 1201 in the figure) can be recorded as traceability information 12d.
[0270] In this case, when performing the next teaching, the efficiency of teaching can be realized by referring to the traceability information 12d. For example, teaching can be performed almost automatically by tracing the traceability information 12d as long as it is almost the same kind of fitting work, without manual input or the like.
[0271] In addition, even if it is not the same kind of fitting work, as l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More