

Method for real-time simulation of unstable target motion trail based on B spline fitting
A motion trajectory and spline fitting technology, applied in the field of signal processing, can solve problems such as single motion mode, limited smooth motion, and inability to simulate non-stationary target motion trajectory
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
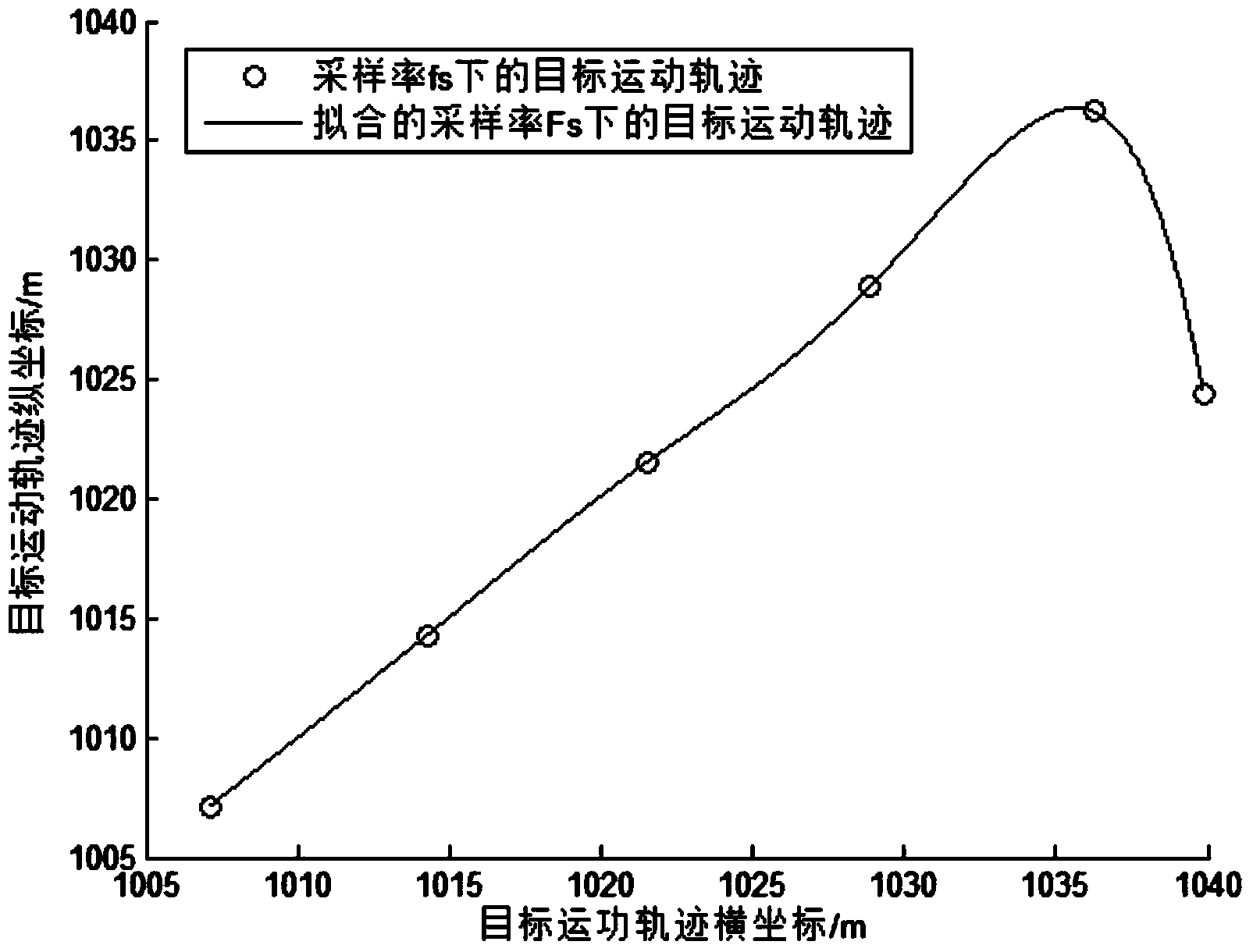
[0077] Existing sampling rate f s =10Hz to simulate a trajectory of a target movement, the length of the trajectory sequence is 6, the target first makes a linear acceleration motion along the 45° direction, and then changes the motion direction and makes a linear acceleration motion along the 270° direction, such as figure 2 shown. In addition, the sampling rate of the target trajectory to be fitted is F s = 6KHz.
[0078] First, simplify f s / F s It is the simplest molecular formula, the numerator of the simplest formula is 1, then select M=16 according to the method introduced in the second step, then the actual measured underwater acoustic target motion track sequence m(i) is intercepted by length M=16, and the first section is taken as The motion trajectory of the 1st to 16th sampling points, the second segment takes the motion trajectory of the 16th to 31st sampling points, and intercepts in sequence, the length of the last sequence is 6.
[0079] Then, the boundar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More