

Compact SFM three-dimensional reconstruction method without feature extraction
A 3D reconstruction and featureless technology, applied in 3D modeling, image analysis, image enhancement, etc., can solve the problems of low-precision 3D reconstruction, inability to obtain optimized results, and inability to truly achieve optimal results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0104] The present invention will be further described below, but the embodiments of the present invention are not limited thereto.
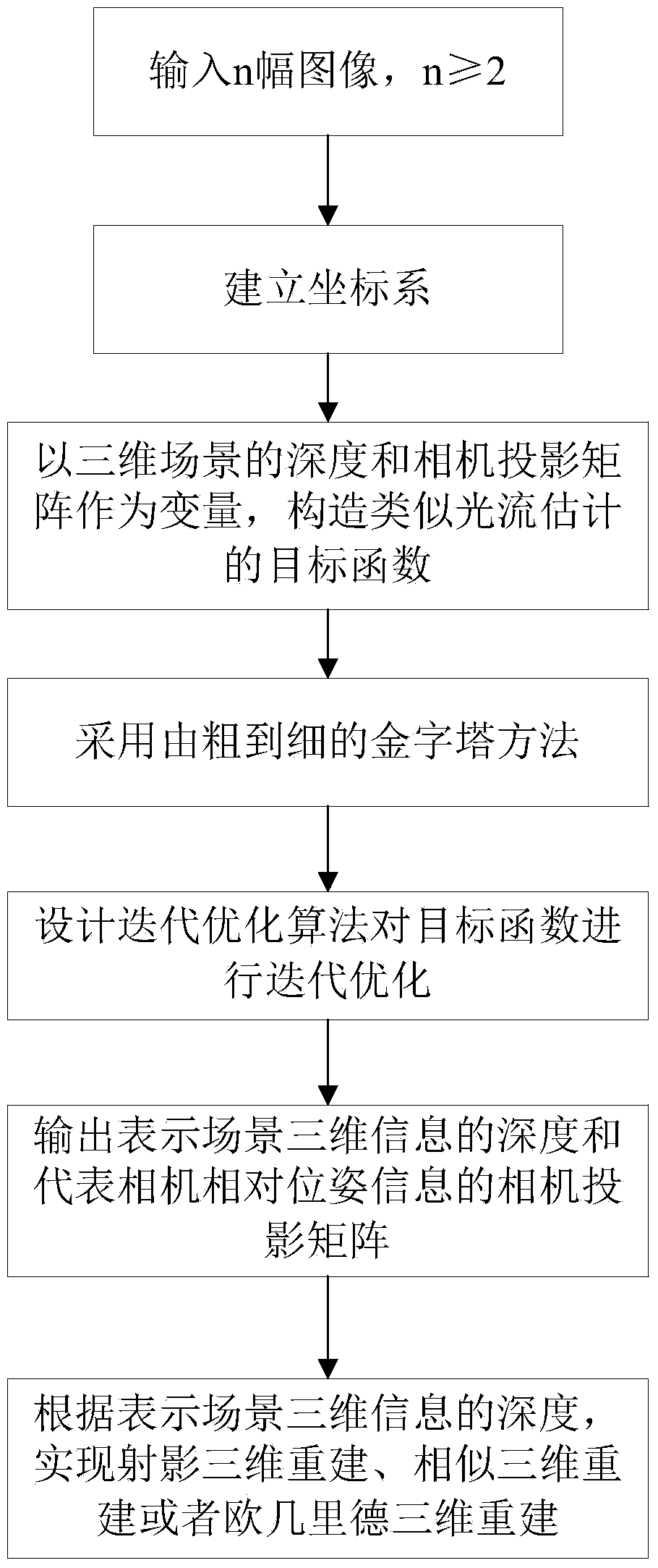
[0105] Such as figure 1 , S1. Input n images about a certain scene, n≥2;
[0106] S2. Establish a world coordinate system that is consistent with a certain camera coordinate system, and set the world coordinate system to be consistent with the coordinate system of the first camera, that is, the origin, x-axis and y-axis of the world coordinate system are the same as the camera center of the first camera, The x-axis and y-axis of the imaging plane of the first camera are coincident, and the z-axis is vertically pointing to the imaging plane of the first camera;
[0107] S3. With the depth of the three-dimensional scene and the camera projection matrix as variables, the depth of the three-dimensional scene refers to the depth q of the three-dimensional space point corresponding to the pixel point of the first image; the camera projection matrix r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More