Cantilever prostate biopsy robot
A prostate and robot technology, applied in the direction of trocars, etc., can solve problems such as restricting the working space of robots, and achieve the effects of dexterity in movement, high stability, and improved treatment effect.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
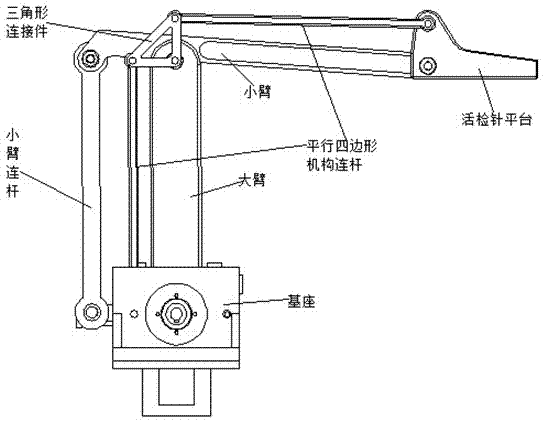
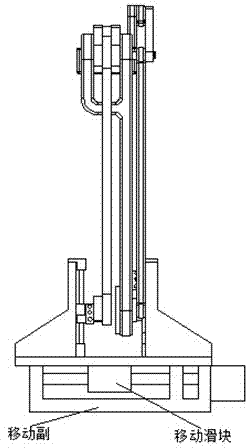
[0011] The working process of the cantilever prostate biopsy robot is as follows: firstly, the coordinate value of the target point in the robot coordinate system is obtained. Secondly, the surface positioning of the target point is carried out, that is, the target point is positioned in the plane where the axes of the upper arm and the forearm are located through the moving pair. Then the target point is positioned on the line, that is, the target point is positioned on the axis of the biopsy needle through the position adjustment of the large and small arm rotary joints. Finally, horizontal and straight puncture is performed, and the process of biopsy acupuncture targeting is completed through the linkage of the large and small arm rotary joints.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More