Linear feature extraction method for indoor environment
A technology of linear features and extraction methods, applied in radio wave measurement systems, instruments, etc., can solve problems such as low algorithm efficiency and large randomness of point selection, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] This example is implemented on the premise of the technical solution of the invention, and a detailed implementation scheme and process are given, but the scope of implementation of the present invention is not limited to the following examples.
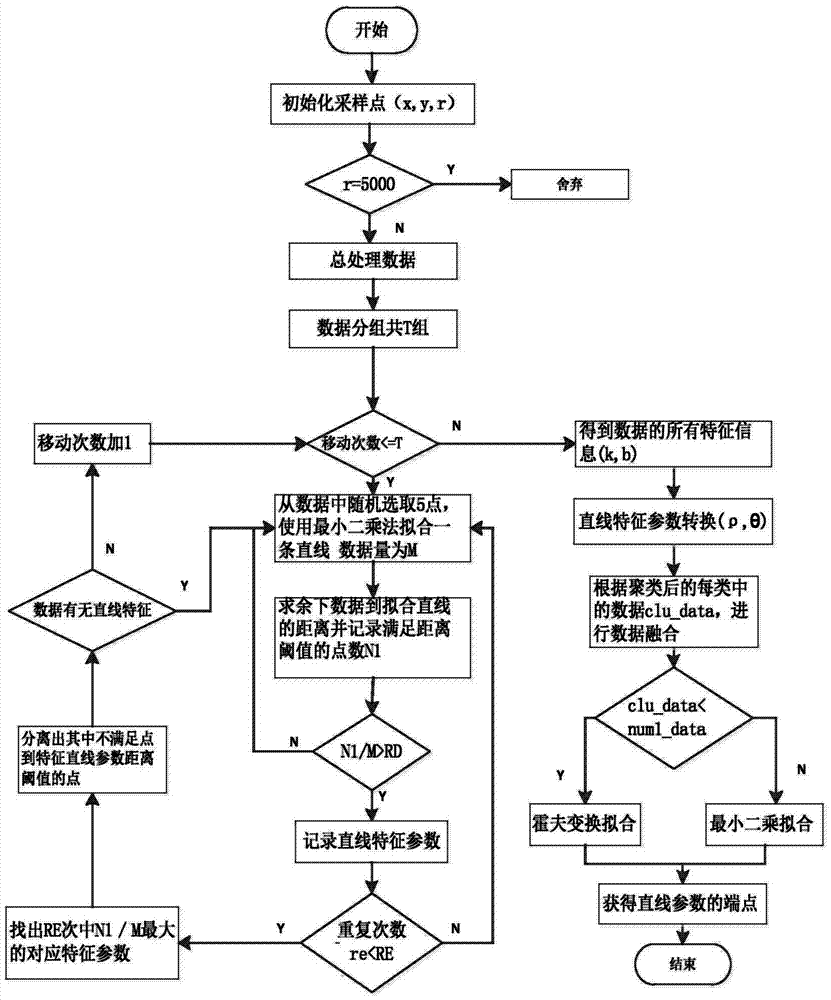
[0029] This embodiment uses data collected by the robot Pioneer3-DX in an indoor environment, and implements linear extraction of environmental features in the Microsoft Visual Studio C++6.0 and matlab R2012a environment. In the experiment, 1200 sets of data collected by the robot are used, and the processing steps according to the present invention are as follows:
[0030] (1) Initialize N sampling points (x, y, r);
[0031] (2) Separate points with r<5000mm (the maximum test distance of the sonar sensor used in the present invention is 5000mm);
[0032] (3) Separate the data obtained by each sensor;
[0033] (4) According to the sensor arrangement of the robot Pioneer3-DX, combine the data of the sensors on the side of the robot acco...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com