

Radiation net fault location method by means of zero mode and aerial mode time difference independent of double-end synchronization and with matching of magnitude of voltages and magnitude of currents
A technology of fault location and current flow, applied in fault location, measurement of electrical variables, measurement of electricity, etc., can solve the problems of high operating cost of the double-ended traveling wave method and difficulty in calibrating the arrival time of the reflected wave head
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
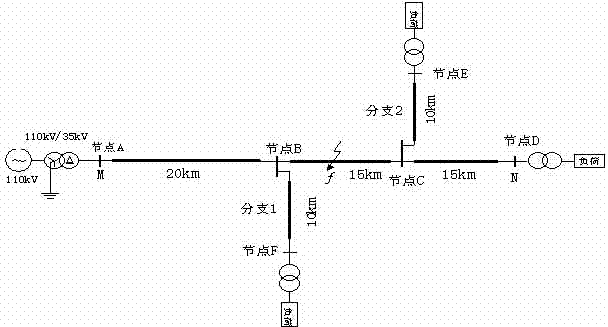
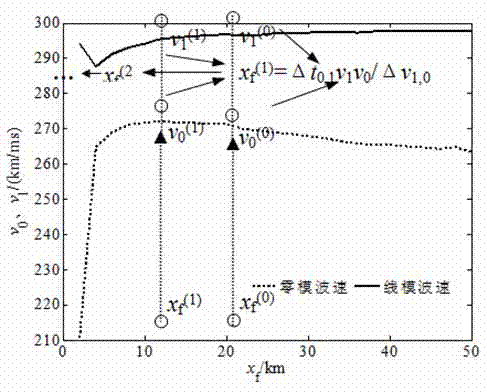
[0031] Example 1: Assuming that a phase A metallic grounding fault occurs on the branch 2 line 40km away from the M terminal, the initial phase angle of the fault is 90°, the simulation sampling frequency is 10MHz, and the wavelet modulus maximum value pairs under the fifth scale are used to measure The line and zero-mode traveling wave components detected at the terminal are calibrated at time, and the M-side line and zero-mode current are as follows: Figure 4 , Figure 5 As shown, N-side line, zero-mode voltage as Figure 6 , Figure 7 shown. The arrival time difference of the M lateral line and zero-mode wave is △ t M = 0.0156ms, the time difference between N-side line and zero-mode wave arrival is △ t N =0.0062ms, select the wave velocity at the midpoint of the feeder as the initial wave velocity iteration value, and use the ranging formula Calculate the initial distance to fault x f (0) , the initial fault distance x f (0) Substituting the line and zero-mo...
Embodiment 2
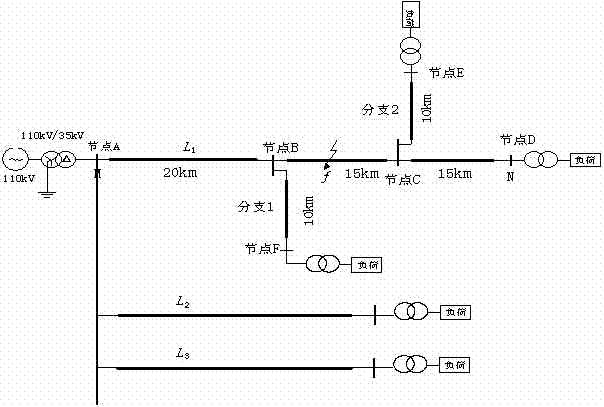
[0032] Example 2: Assuming that a phase A metallic grounding fault occurs on the main line 25km away from the M terminal, the initial phase angle of the fault is 90°, the fault transition resistance is 300Ω, and the simulation sampling frequency is 10MHz, respectively using the wavelet mode poles under the fifth scale The maximum value is used to calibrate the line and zero-mode traveling wave components detected by the measuring terminal at time, and obtain the M measuring terminal line, zero-mode current traveling wave, N measuring terminal line, zero-mode voltage traveling wave and its modulus maximum value calibration. The arrival time difference between M side and N side line and zero-mode wave is △ t M and △ t N , select the wave velocity at the midpoint of the feeder as the initial wave velocity iterative value, and use the ranging formula Calculate the initial distance to fault x f (0) , the initial fault distance x f (0) Substituting the line and zero-mode i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More