

Control system and control method for deep-sea work type ROV
A control system, deep-sea technology, applied in the direction of comprehensive factory control, comprehensive factory control, electrical program control, etc., can solve problems such as complex task planning, and achieve the effects of easy system maintenance, strong scalability, and good stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The present invention will be further described below in conjunction with accompanying drawing:
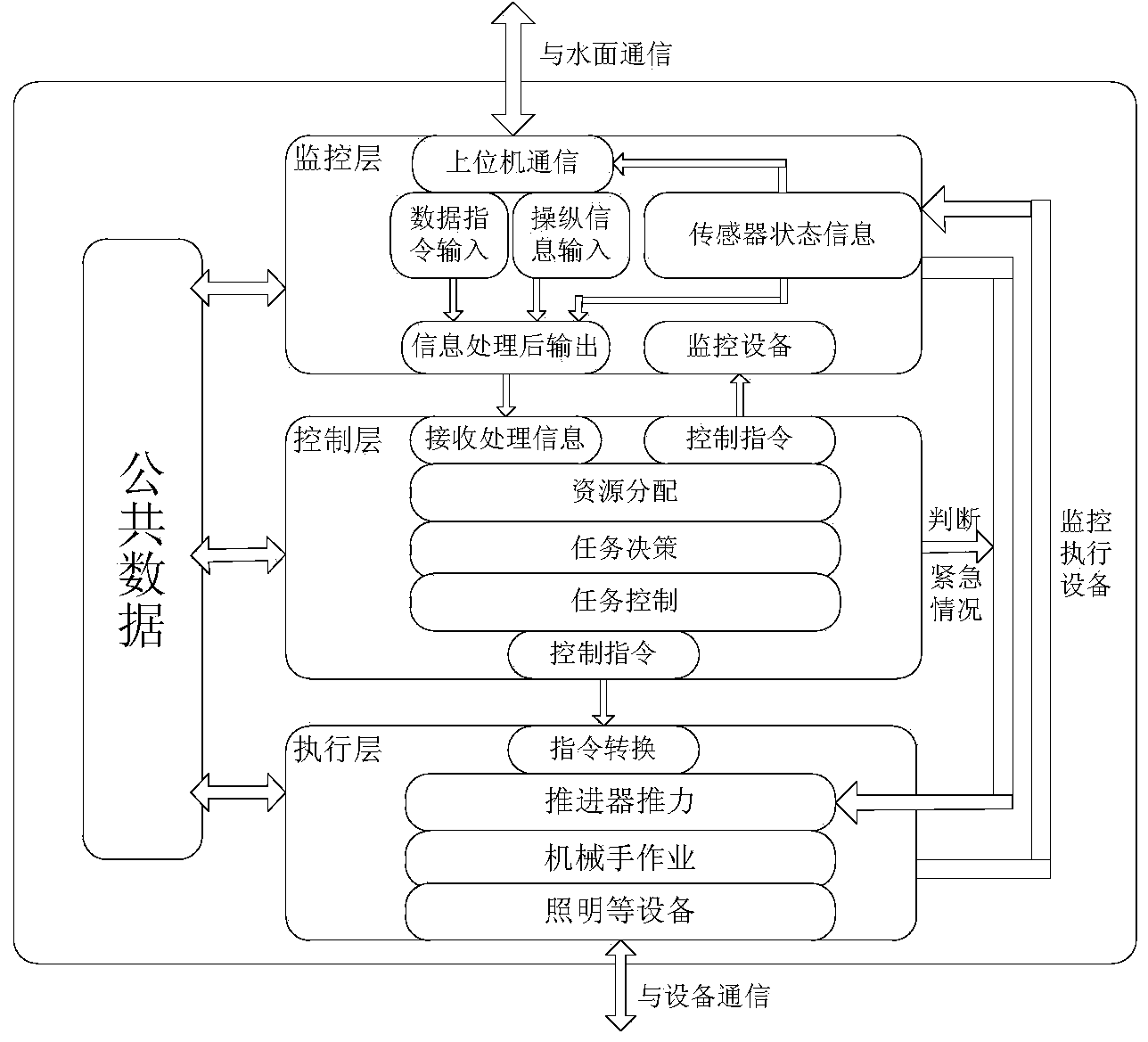
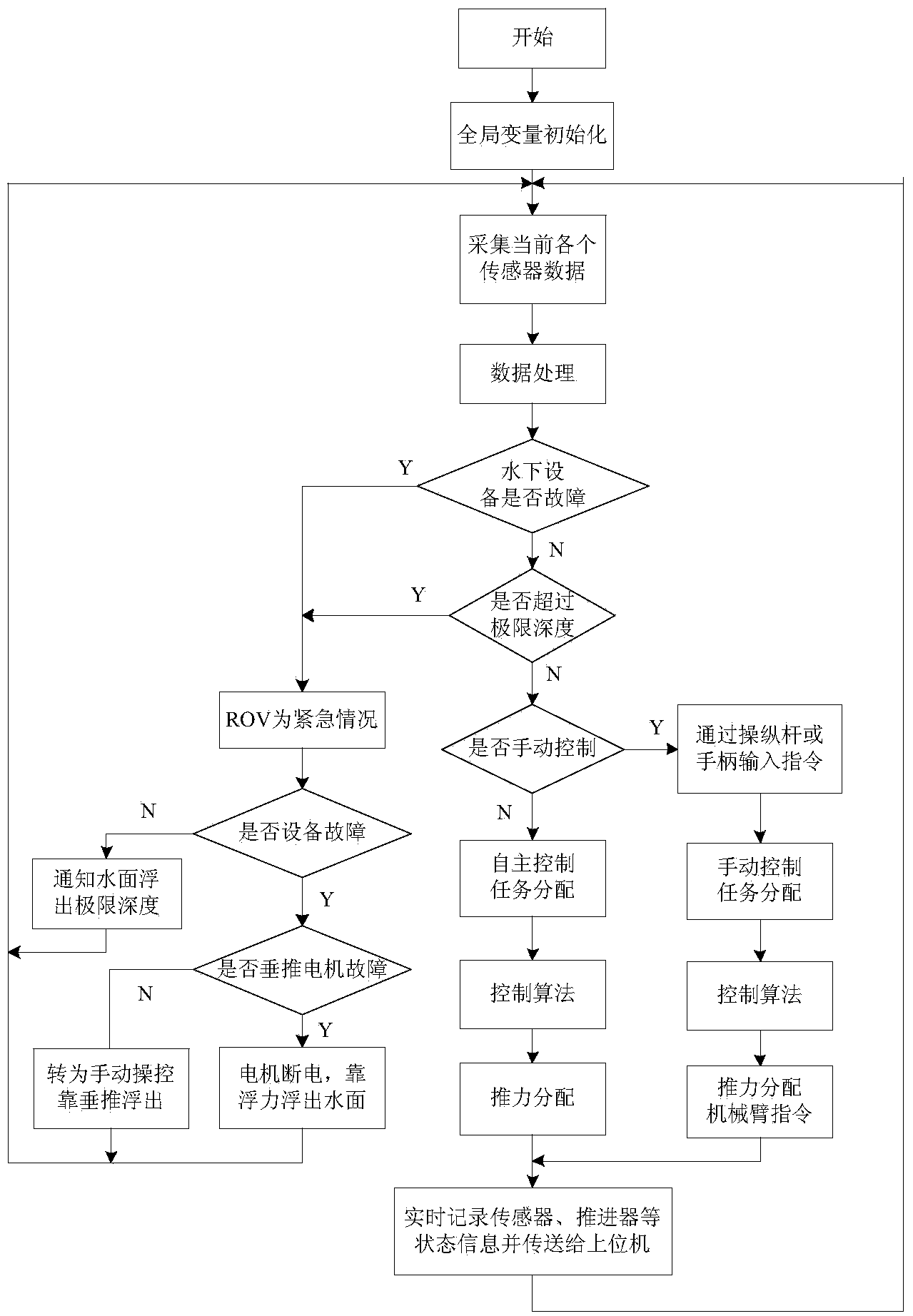
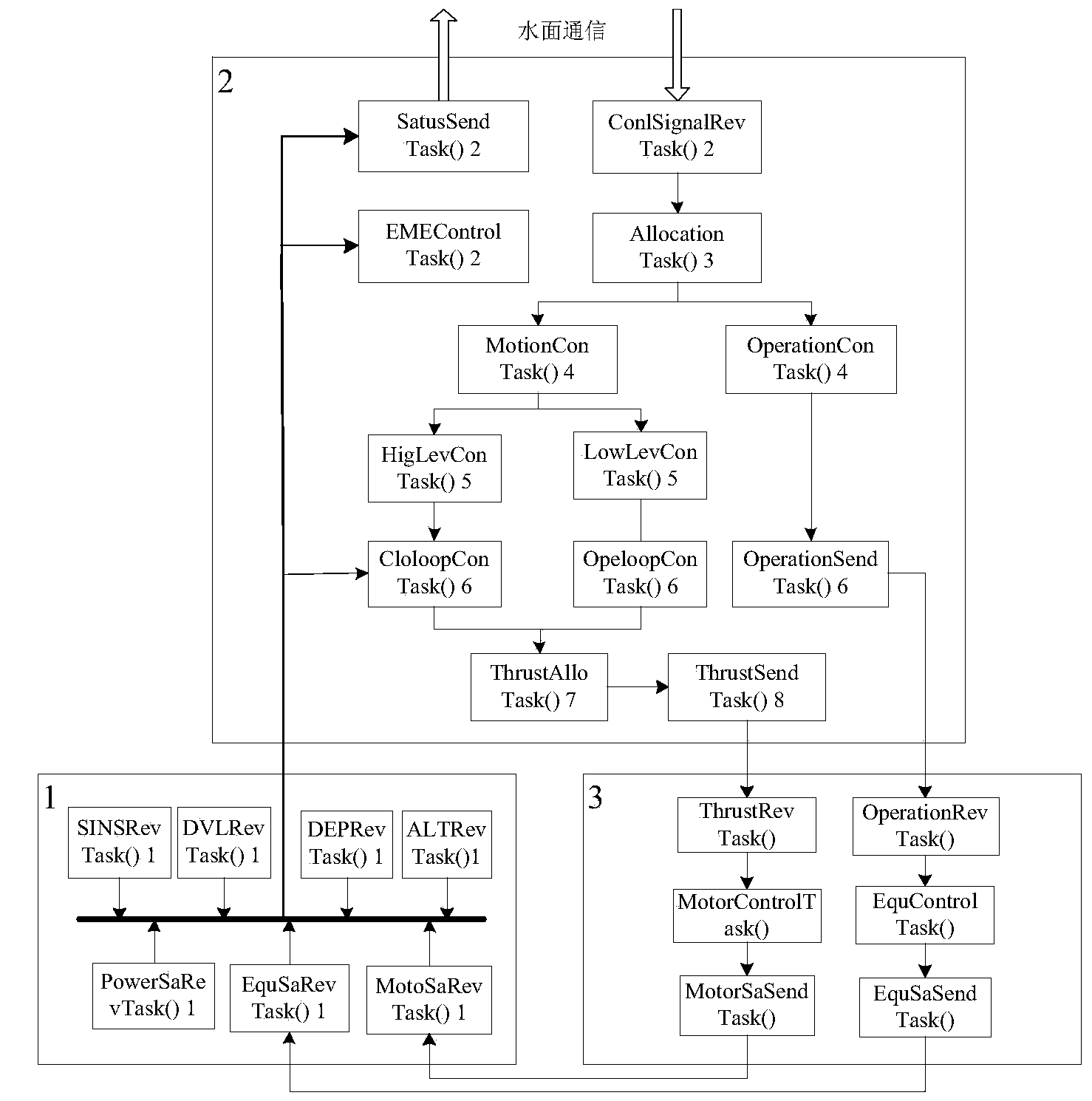
[0026] The invention provides a deep-sea operation type ROV control system software structure and control method. The structure is suitable for the ROV control system based on the VxWorks real-time embedded system. It is divided into four parts: monitoring layer, control layer, execution layer, and data management layer: monitoring The layer is used to monitor sensor data and ROV equipment status and complete data communication; the control layer and execution layer together complete ROV movement and underwater operation control; the data management layer is used to store ROV system global variables. The ROV control system software also includes: the control method based on the ROV task control process; the ROV detailed task process characterized by the operation of the task function (Task) in the VxWorks embedded software program; ROV motion control and stability control me...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More