

Capture tolerance capacity testing system and method of three-jaw type space end effector in microgravity environment
An end-effector and capability testing technology, applied in the field of space robots or spacecraft ground verification systems, can solve problems such as inability to achieve six-degree-of-freedom motion of robotic arms or spacecraft, poor safety and reliability, and complex verification systems. The effect of low cost, good reliability and simple system structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
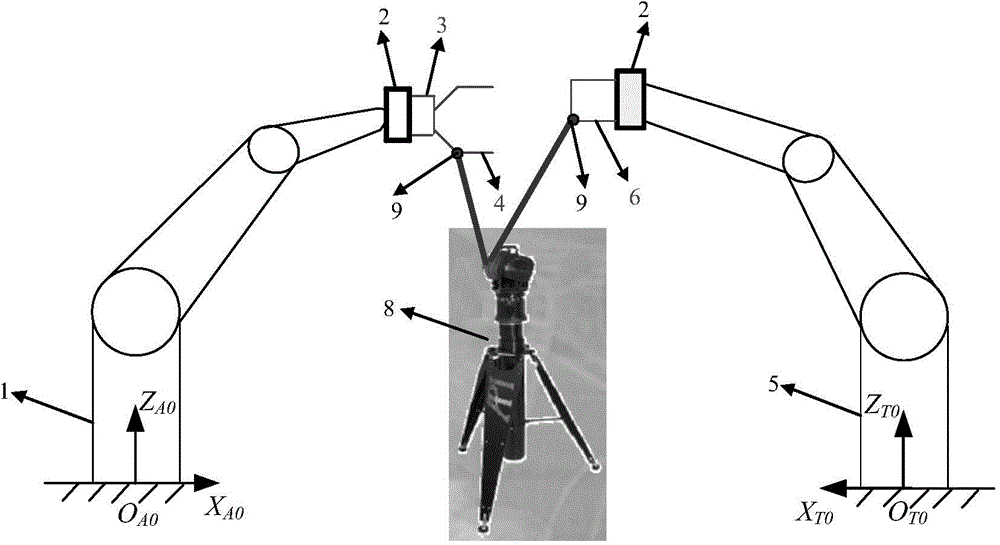
[0055] Embodiment 1: The capture tolerance capability test system of the three-jaw space end effector in the microgravity environment of this embodiment includes a capture subsystem, a target subsystem and a measurement subsystem;
[0056] The capture subsystem includes an industrial robot A1, a six-dimensional torque sensor 2, a hand-eye camera 3 and a three-jaw space end effector 4;
[0057] Among them, the end of the industrial robot A1 is fixed with a six-dimensional torque sensor 2, a hand-eye camera 3 and a three-jaw space end effector 4, and the industrial robot A1 is mainly used to simulate the movement of the space robot 7 in a three-dimensional space in a microgravity environment. Six degrees of freedom movement;
[0058] The target subsystem includes a six-dimensional torque sensor 2, an industrial robot T5 and a target 6 to be captured;
[0059] The end of the industrial robot T5 is equipped with a six-dimensional torque sensor 2 and a target 6 to be captured, and...
specific Embodiment approach 2
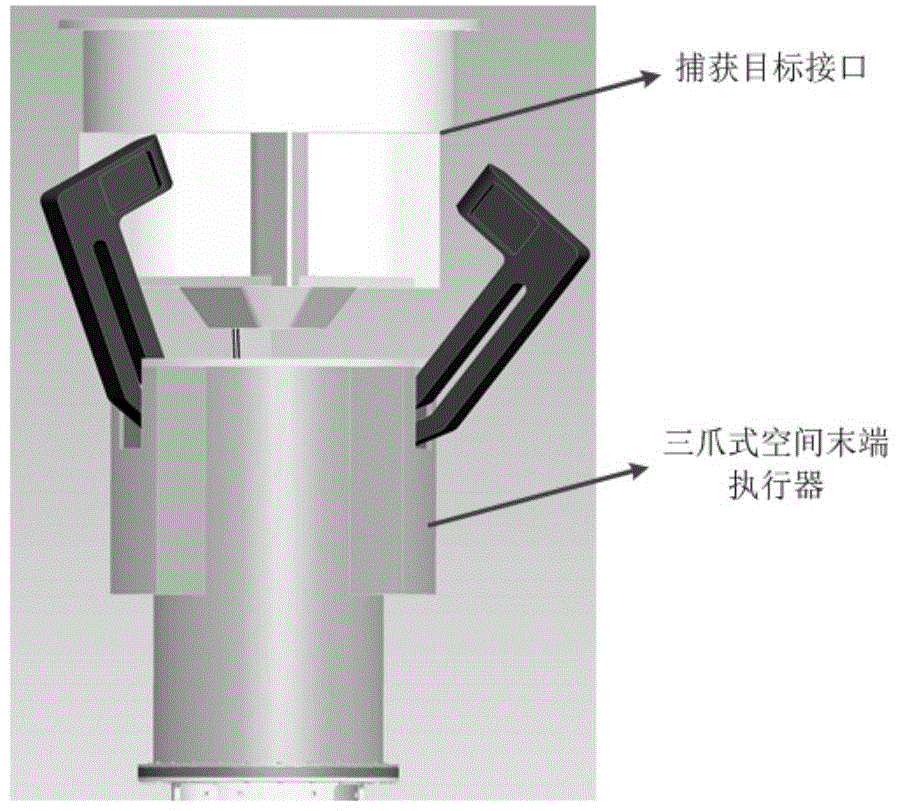
[0065] Specific embodiment 2: The difference between this embodiment and specific embodiment 1 is that the three-jaw space end effector 4 is mainly composed of three capturing grippers installed evenly along the circumference and a drag mechanism, and the captured target The interface is a mechanical interface with three evenly spaced wedge-shaped grooves.
[0066] The three-jaw space end effector 4 is mainly composed of three capturing grippers uniformly distributed along the circumference and a drag mechanism, and the captured target interface is a mechanical interface with three uniformly distributed wedge-shaped grooves. The capture tolerance of the form of the end effector can also be tested.
[0067] Other steps and parameters are the same as those in Embodiment 1.
specific Embodiment approach 3
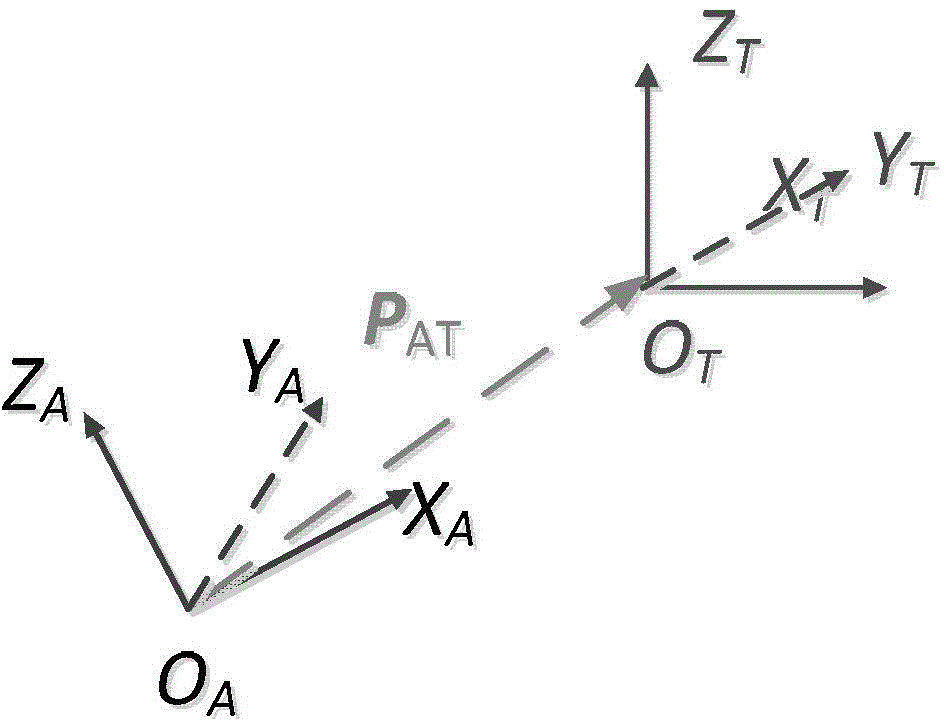
[0068] Embodiment 3: This embodiment differs from Embodiment 1 or Embodiment 2 in that: the hand-eye camera 3 is mainly used to provide the relative pose relationship between the three-jaw space end effector 4 and the target 6 to be captured.
[0069] Other steps and parameters are the same as those in Embodiment 1 or Embodiment 2.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More