

Self-adaption mixed filtering method of GPS/SINS (Global Positioning System/Strapdown Inertial Navigation System) super-compact integrated navigation system
An ultra-tight integrated navigation and self-adaptive technology, which is used in navigation, navigation, mapping and navigation through speed/acceleration measurement. The effect of reducing the system navigation accuracy and improving the navigation and positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
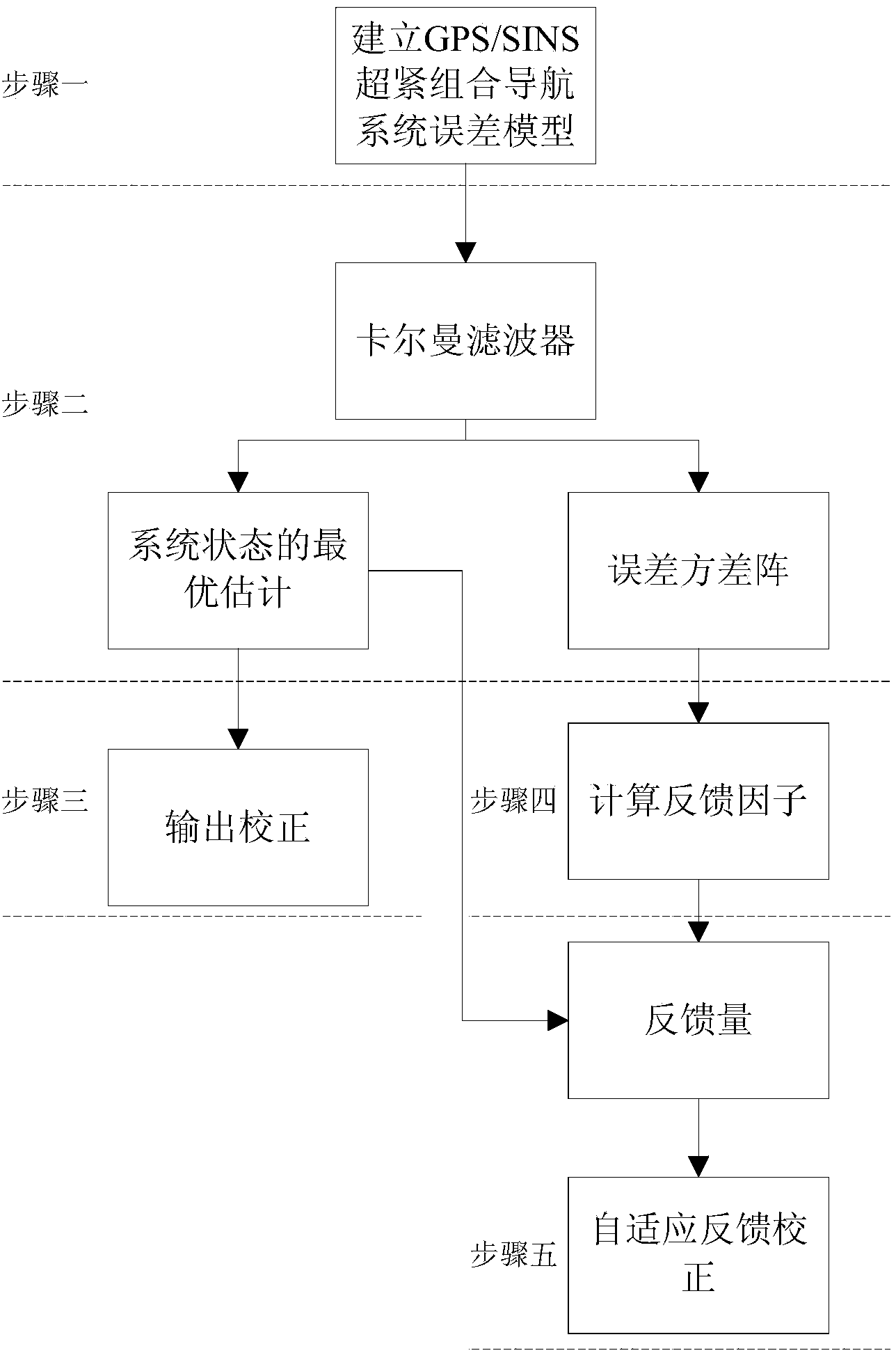
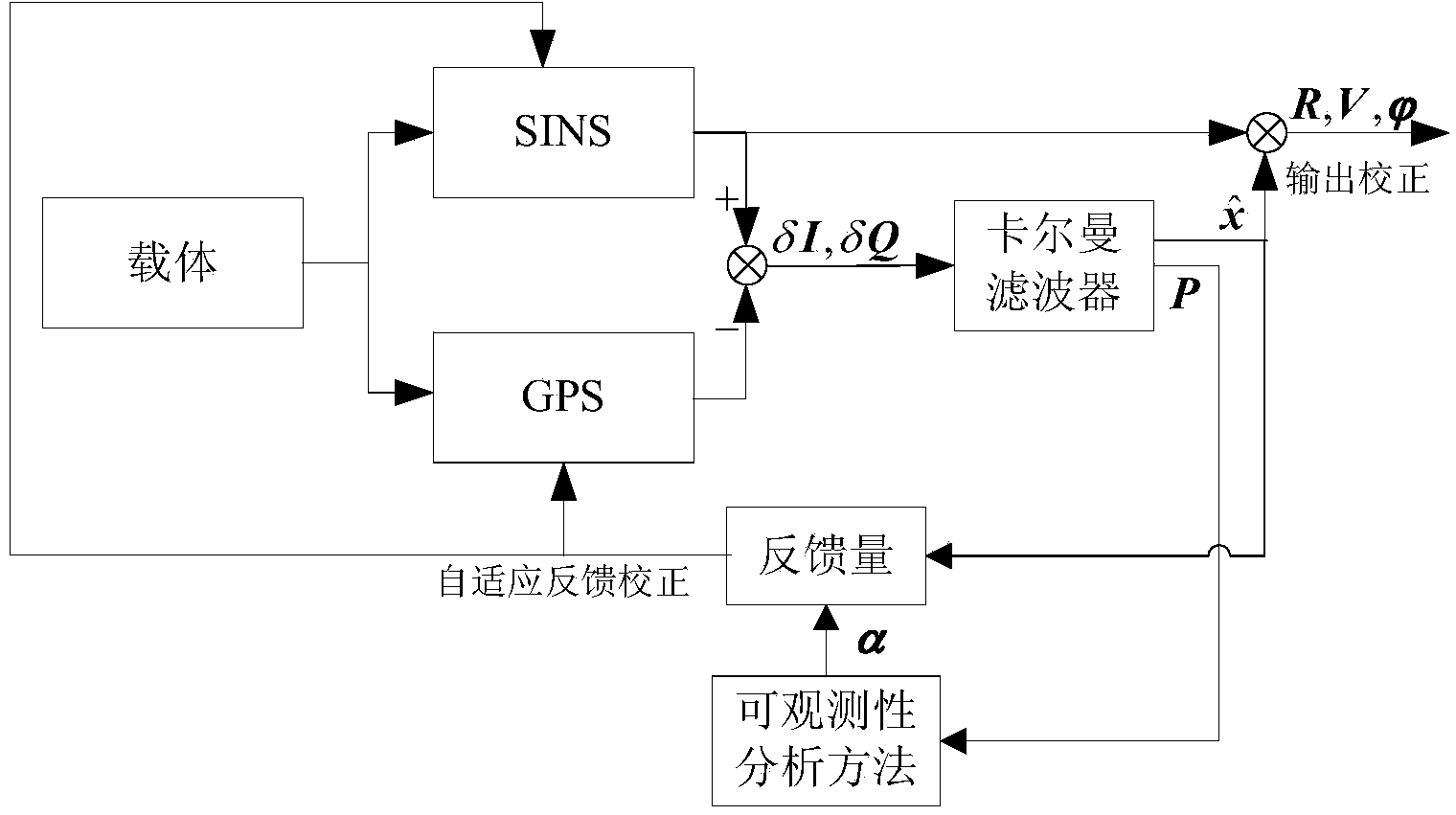
[0031] Such as figure 1 , figure 2 Shown, the inventive method comprises the following steps:
[0032] Step 1: Establish the error model of GPS / SINS ultra-tight integrated navigation system;
[0033] The specific implementation steps are:
[0034] Step 1.1: Establish the state equation of the GPS / SINS ultra-tight integrated navigation system;
[0035] The state variables are: X = δR δv φ ▿ ϵ δ t u δ t ru T , where δR=[δL δλ δh] T is the position error; δv=[δv E δ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More