

Movement Control Device, Movement Control Method And Numerical Control Device
A control device and control object technology, applied in the direction of digital control, electrical program control, control using feedback, etc., can solve the problem that the numerical control device is difficult to perform multiple intervals
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
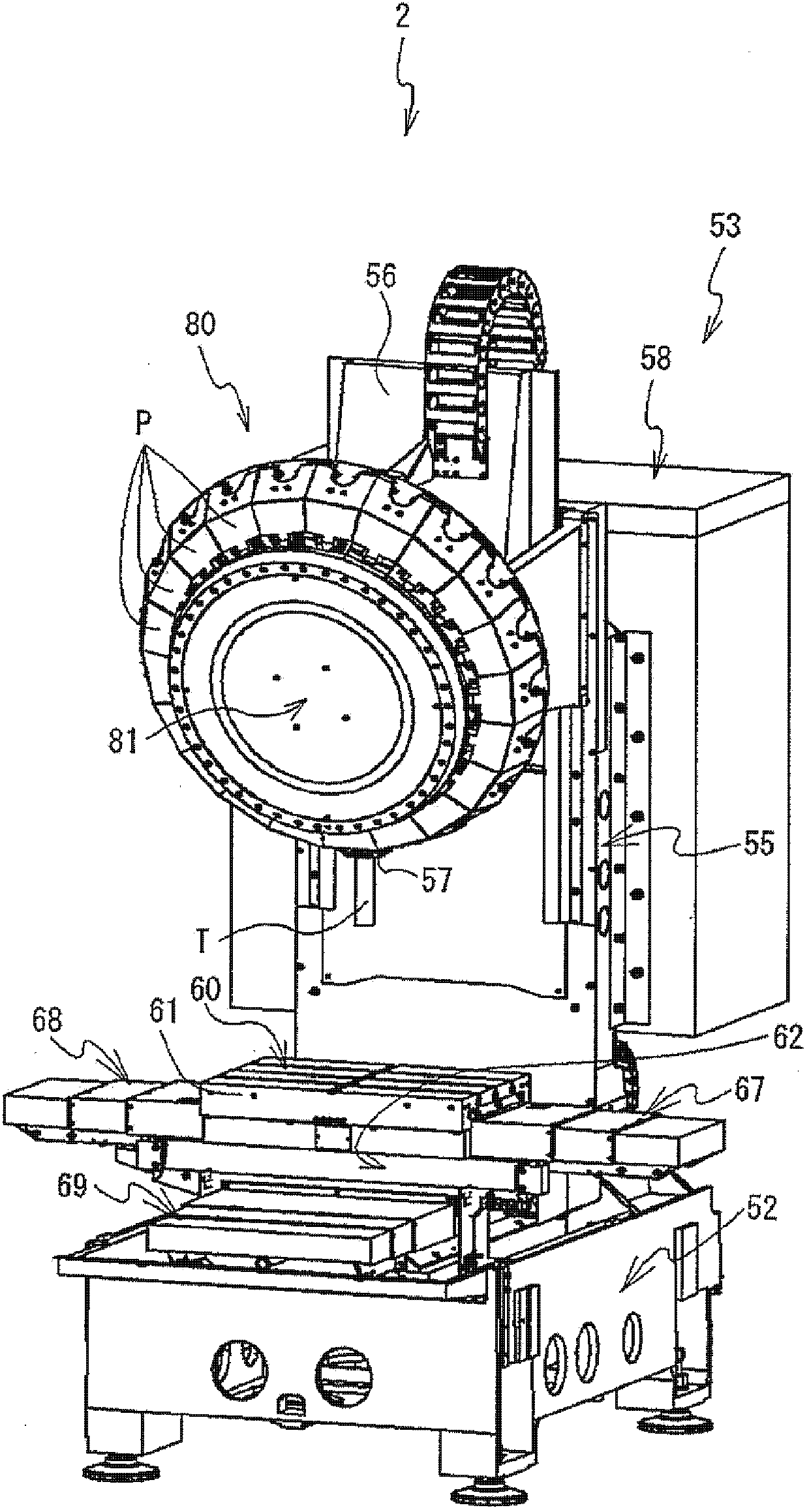
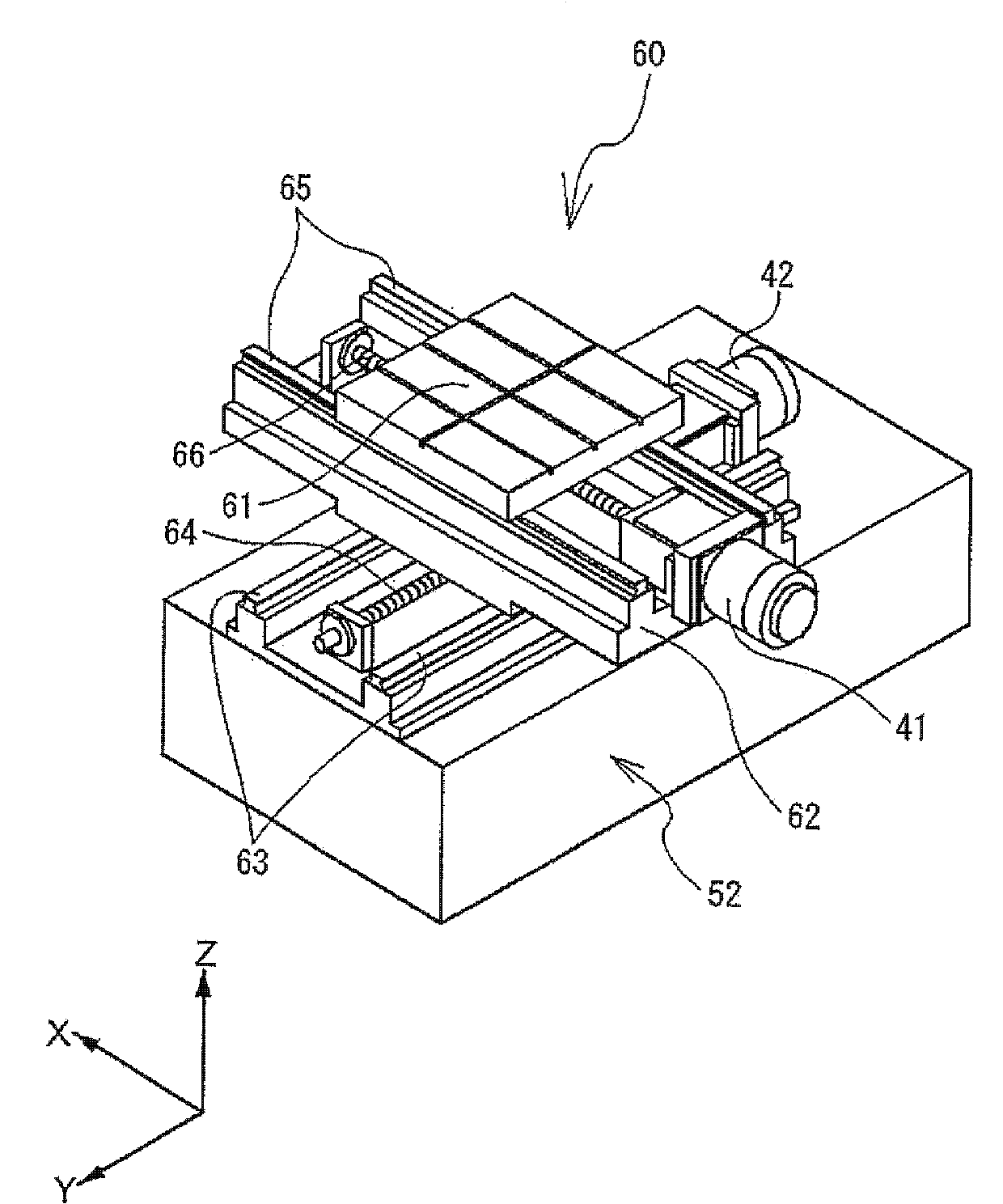
[0019] Embodiments of the present invention will be described below with reference to the drawings. The machine tool 2 includes a base 52, a machine tool body 53, an XY table mechanism 60, a tool changing device 80, and the like. The base 52 is a substantially cuboid base made of iron. The machine tool body 53 is provided behind the upper part of the base 52 and cuts a workpiece (not shown) held on the upper surface of an X table 61 described later. The XY platform mechanism 60 is located at the center of the upper part of the base 52 , which drives the X platform 61 toward the X-axis direction and the Y-axis direction. The tool changing device 80 is provided on the upper part of the machine tool body 53 , and replaces the tool T attached to the spindle 57 of the machine tool body 53 . Next, the structure of the machine tool main body 53 will be described. The main body 53 of the machine tool includes a column 55 , a spindle head 56 , a spindle 57 , a control box 58 and the...
Embodiment approach 2
[0029] In Embodiment 2, the control unit 10 also performs processing of changing the average speed based on signals of a plurality of periods.
[0030] The control unit 10 of Embodiment 2 counts the number of times the input unit 17 outputs a signal within a predetermined period constituted by N times a certain time. When the number of signals counted within the period is equal to or greater than a predetermined value and the number of signals counted in a predetermined period (previous period) before this period is also equal to or greater than a predetermined value, the control unit 10 performs the following control. The control unit 10 calculates the integrated value of the movement amount indicated by the signal output during the period and the previous period. The control unit 10 divides the calculated integrated value by 2N (N+N). The control unit 10 outputs a signal for continuously moving the movement control object at an average speed based on the value obtained by t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More