

Quasi-SCARA (Selective Compliance Assembly Robot Arm) industrial robot
An industrial robot, a type of technology, applied in the direction of manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of inability to realize lifting movements such as suction and discharge, and can not be used, so as to simplify design complexity, reduce height, and reduce The effect of moment of inertia
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
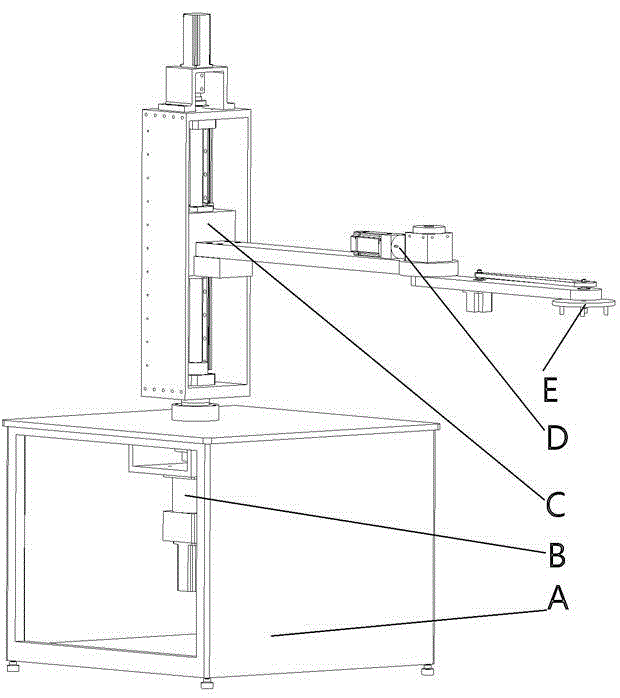
[0030] Such as figure 1 As shown, a type of SCARA industrial robot includes a base A, a whole arm rotation mechanism B, a vertical movement mechanism C, a small arm rotation mechanism D and an execution end rotation mechanism E, and the whole arm rotation mechanism B is fixed on the base A , the vertical movement mechanism C is installed on the whole arm rotation mechanism B, the whole arm rotation mechanism B drives the vertical movement mechanism C to rotate, the small arm rotation mechanism D is fixed on the vertical movement mechanism C, and the vertical movement mechanism C drives the forearm rotating mechanism D to move vertically, the actuator rotating mechanism E is installed on the forearm rotating mechanism D, and the forearm rotating mechanism D drives the executing end rotating mechanism E to rotate, forming a serial industrial robot structure.
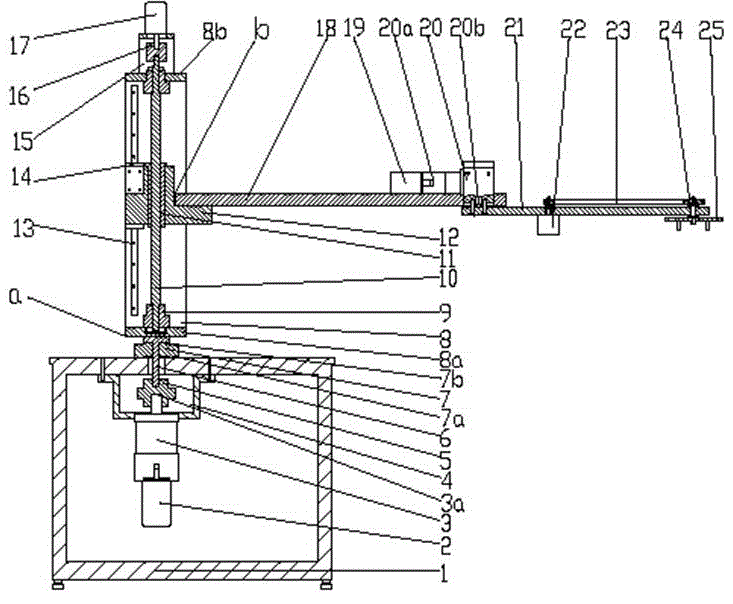
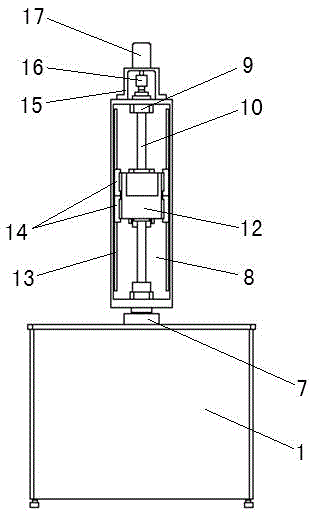
[0031] In the embodiment of the present invention, as Figure 2A , 2B , 2C, the whole arm rotating mechanism B include...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More