

Electro hydraulic servo system self-correction fuzzy PID control method
An electro-hydraulic servo system and self-correction technology, applied in the field of control algorithms of electro-hydraulic servo systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0028] The present invention and its implementation will be further described in detail below in conjunction with the accompanying drawings.
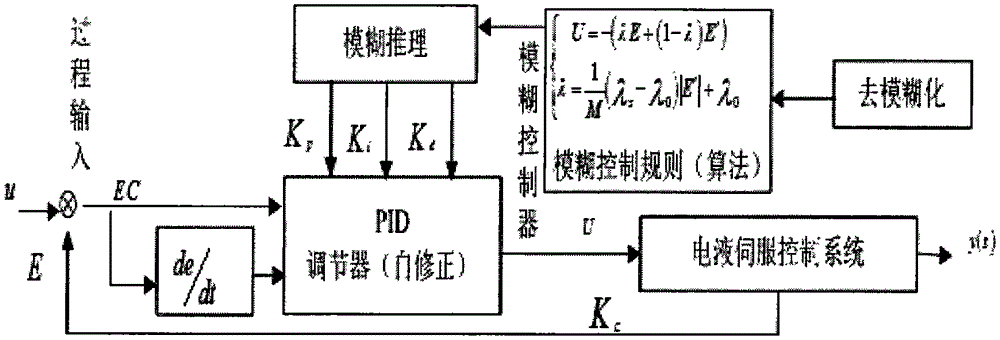
[0029] Such as figure 1 As shown, a method for self-correcting fuzzy PID control of an electro-hydraulic servo system comprises the following steps:
[0030] Step 1. Determine the input and output of the self-correcting fuzzy PID controller
[0031] Taking the electro-hydraulic servo control mechanism as the controlled object, taking the error E between the feedback value of the controlled object and the target value and the error change rate EC as the input of the fuzzy PID controller, the parameter variation △k of the fuzzy PID controller p , Δk i and Δk d as output;
[0032] Step 2. Select input quantity, output quantity membership degree and its domain of discussion
[0033] Input deviation e and deviation change rate ec, and output △k p , Δk i and Δk d The domain of variable fuzzy set is [-M, M], and its membership function...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More