

A Path Planning Method for Mobile Robots Based on Variable Dimensional Particle Swarm Algorithm
A mobile robot and path planning technology, applied in two-dimensional position/channel control, instruments, calculations, etc., can solve problems such as ineffective solutions and reasonableness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
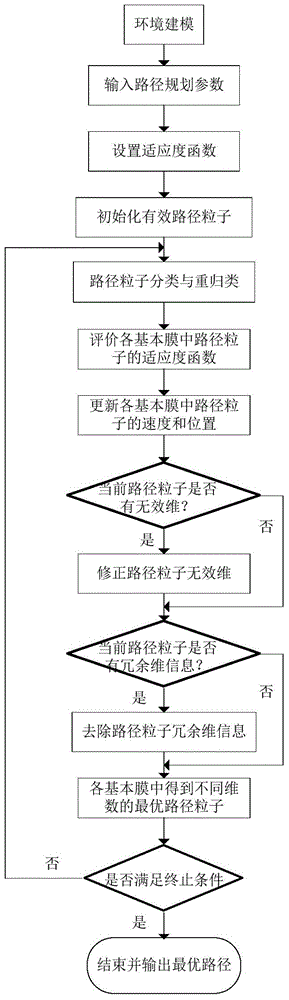
Method used
Image

Examples
Embodiment
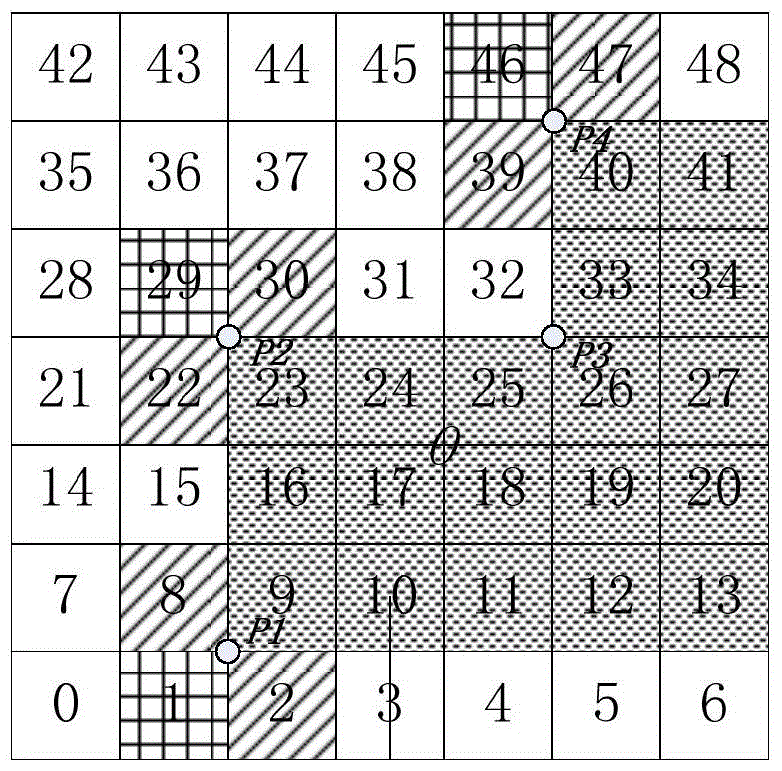
[0175] For the present invention, several types of environmental models are designed to check the effect of the algorithm of the present invention, using such as Figure 9 The 16*16, 32*32, and 64*64 grid numbers shown in the environment models with exponential growth are used to verify the algorithm. where O s is a static obstacle, O d is a dynamic obstacle, where the dynamic obstacle is obtained by passing the functional function parameter into the main program to change the environment state variable table after the algorithm iteration starts running, and the grid size is equal to the diameter R of the wheeled mobile robot d , do a grid unit expansion process on static obstacles, and consider the objective function relationship in three cases:
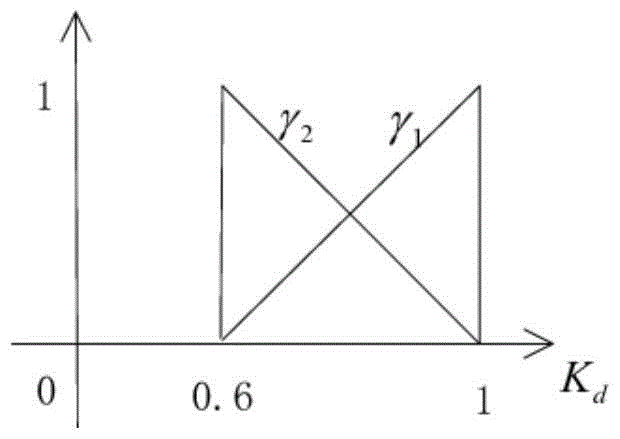
[0176] Case1:K d = 1,K f =K s = 0, γ 1 =1,γ 2 = 0;
[0177] Case2:K d =0.6,K f =K s = 0.2, γ 1 =0,γ 2 = 1;
[0178] Case3:K d =0.8,K f +K s = 0.2, γ 1+γ 2 =1.
[0179] For the grid environment of 16·16 and 32·32,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More