

Mobile robot SLAM method based on image marker identification
A mobile robot, robot technology, applied in the field of robotics, can solve problems such as the limited perception ability of robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] Describe the present invention below in conjunction with specific embodiment:
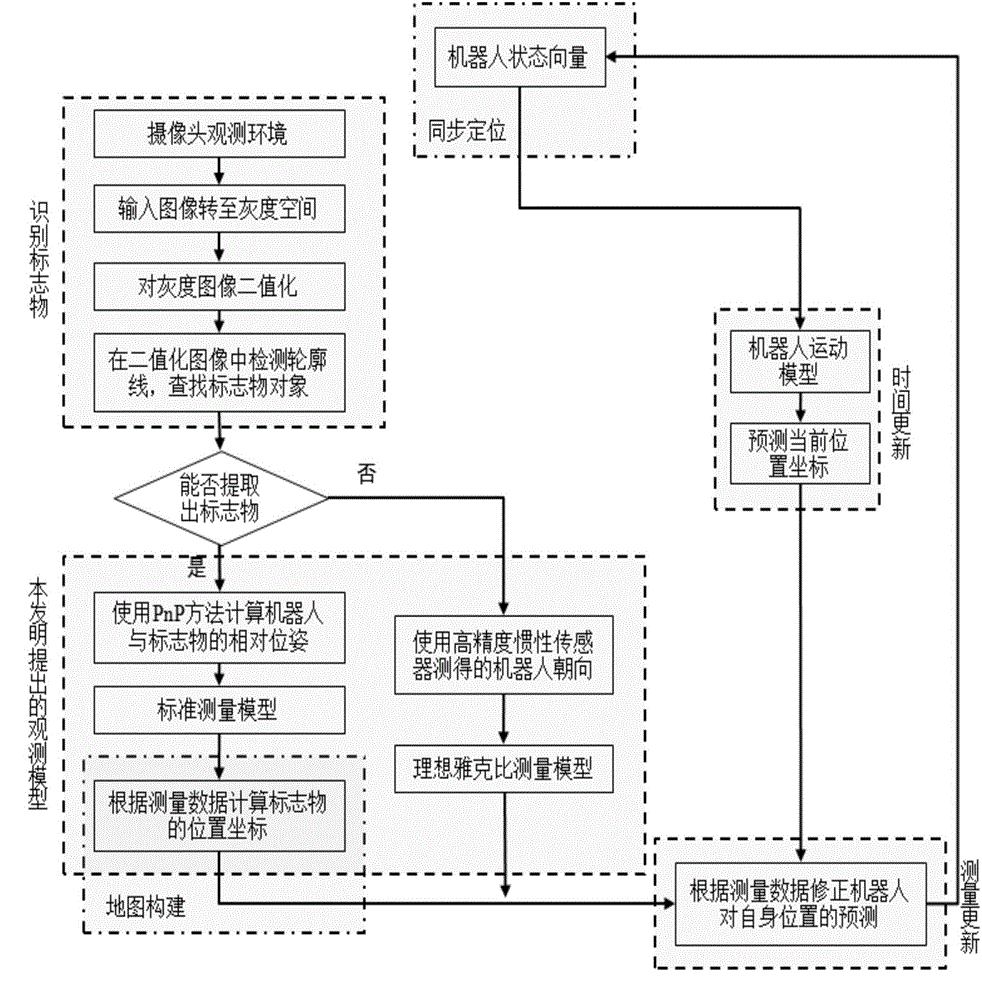
[0062] attached figure 1 The general flow of the robot SLAM method realized by the present invention is shown. The figure contains all the steps of the robot's SLAM process. The purpose of the present invention is to enable the robot to obtain better SLAM results. The marker measurement data is obtained by processing the images acquired by the camera, and the observation data of the ideal Jacobian model is obtained by the airborne high-precision inertial sensor. The model parameter calculation and computer image processing involved in the entire SLAM process are realized by the program. The resulting map is represented by a series of "waymark" point coordinates recorded.
[0063] The following are the specific implementation steps:
[0064] Step 1: Time update of robot state parameters
[0065] The state vector of the robot at the kth moment in the motion process is x k =(x k ,m) T ....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More