

Implementation method of real-time circular interpolation for industrial robots based on spatial coordinate transformation
An industrial robot and circular interpolation technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve problems such as few studies on multi-coordinate axis systems, poor precision, and complex algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described below with reference to the accompanying drawings and embodiments.
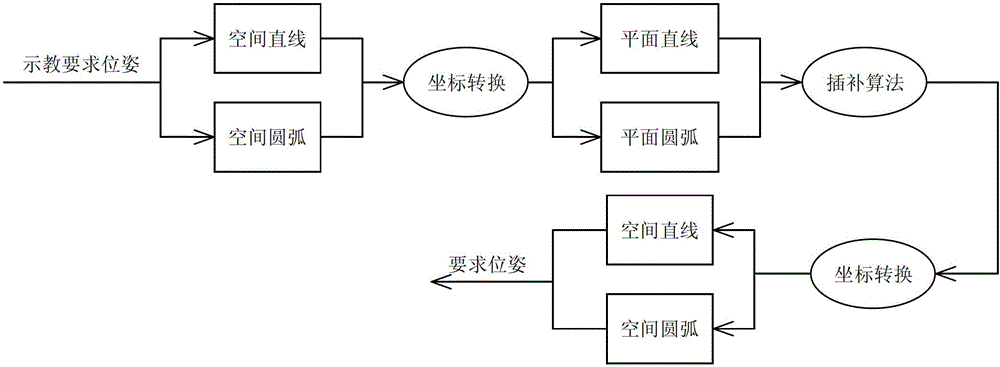
[0028] refer to figure 1 As shown, the present invention discloses a real-time circular interpolation implementation method for an industrial robot based on spatial coordinate transformation, comprising the steps of:
[0029] S1. Determine the required pose of the industrial robot through teaching, and the robot controller obtains the motion trajectory provided by the teaching box through the communication port.
[0030] S2. The central processing unit of the robot controller converts the motion trajectory into a space straight line or a space arc after calculation;
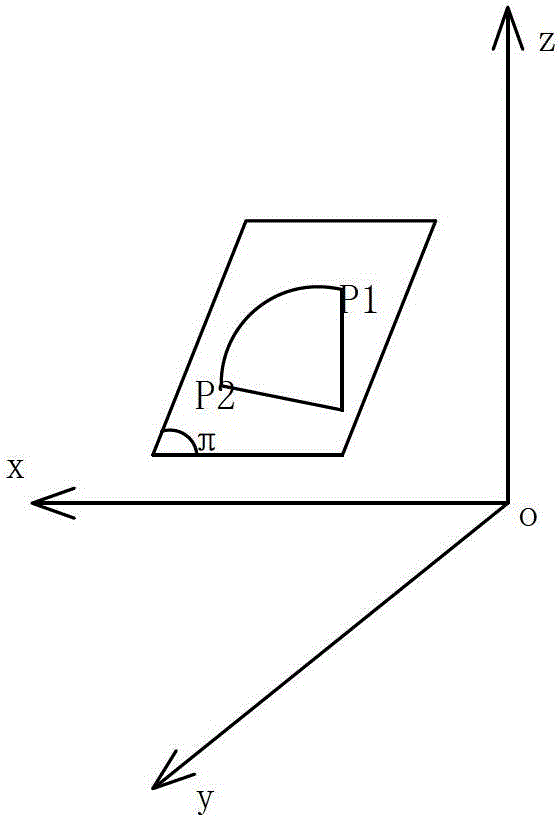
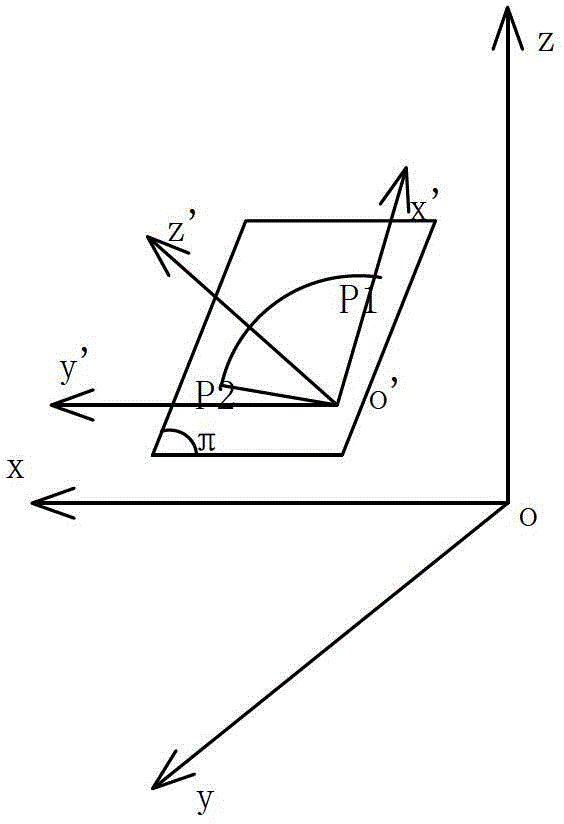
[0031] S3, the central processing unit of the robot controller, after further operation, converts the space straight line into a plane straight line through coordinate conversion, and converts the space arc into a plane arc;
[0032] S4. The central processing unit of the robot controller ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More