

Mobile robot positioning system
A mobile robot, positioning system technology, applied in the direction of instruments, measuring devices, surveying and navigation, etc., can solve the problems of long data processing cycle, poor anti-electromagnetic interference ability, unreliability, etc., and achieve stable and reliable U-turn links and fast response speed , the effect of high detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described in detail below in combination with specific embodiments. However, it should not be understood that the scope of the above subject matter of the present invention is limited to the following embodiments, and all technologies realized based on the content of the present invention belong to the scope of the present invention.
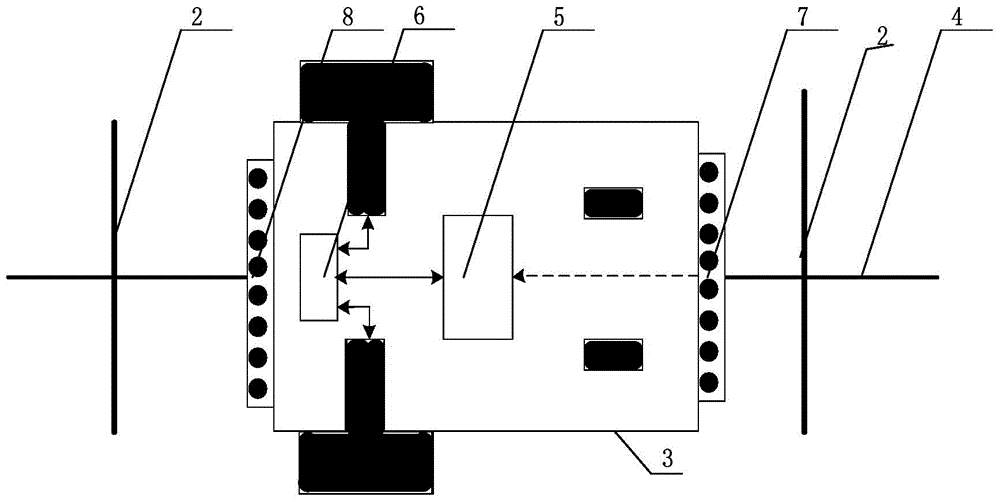
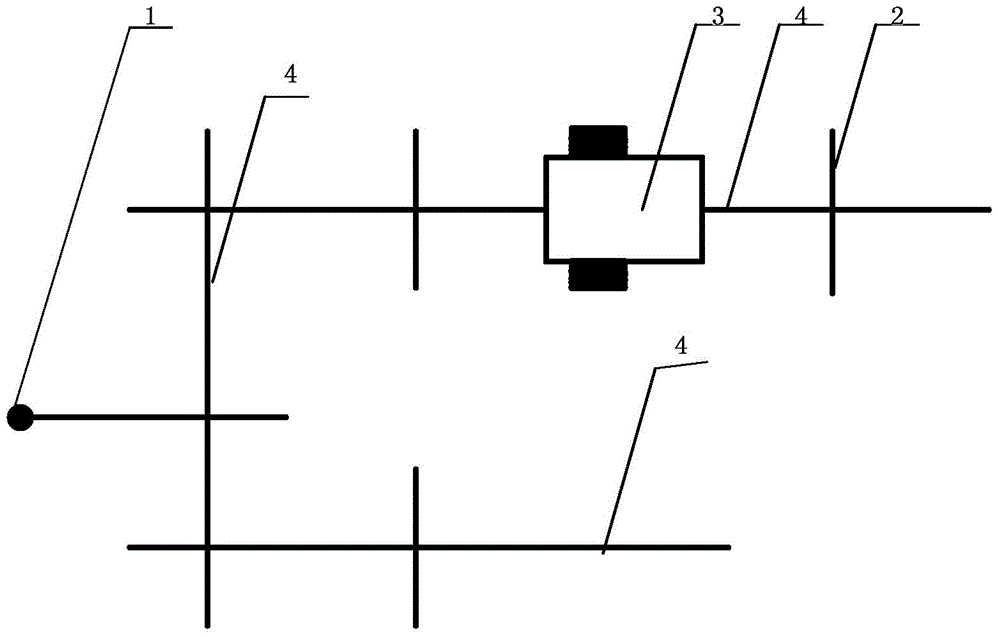
[0025] Such as Figure 1-2 The mobile robot positioning system shown includes a plurality of magnetic guide rails 4 arranged in the workplace of the robot 3, and the plurality of magnetic guide rails 4 are connected in sequence, and the position to be monitored in the workplace and between two adjacent magnetic guide rails 4 Magnetic strips 2 are arranged at each place, and the section between two adjacent magnetic strips 2 constitutes the working section where the robot 3 runs along the magnetic guide rail 4; the robot 3 is provided with an industrial computer 5, and the chassis of the robot 3 The f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More