

Rapid image three-dimensional matching method and device
A stereo matching and fast technology, applied in the field of computer vision, which can solve problems such as slow convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0060] The preferred embodiments of the invention will be further described in detail below.
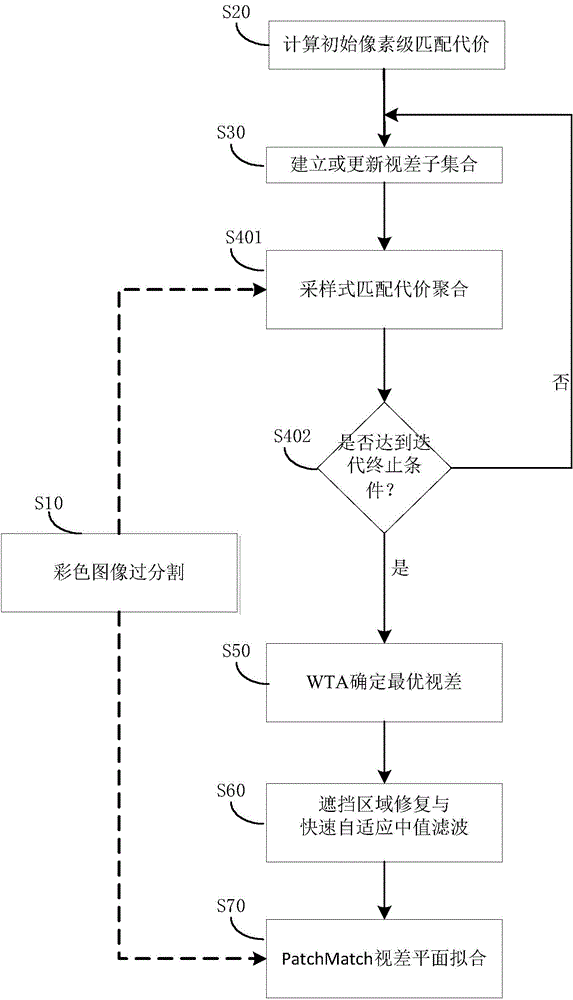
[0061] like figure 1 As shown, the image fast stereo matching method of an embodiment of the present invention comprises the following steps:
[0062] S10, the reference view is over-segmented.
[0063] One image of the stereo image pair to be matched is taken as the reference view I, and the other image is the target view I′. Use the MeanShift algorithm to over-segment the reference view to N S non-overlapping regions, and each over-segmented region is denoted as S c , c=1, 2, ..., N S .
[0064] S20, calculating an initial pixel-level matching cost.
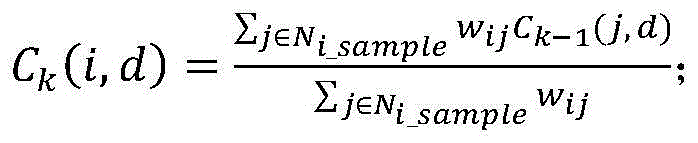
[0065] The pixel-level matching cost uses the matching cost function of gray level difference (or color difference) and 8 neighborhood gradient difference and weighting. For pixel i in reference view I and candidate disparity d, pixel i' in target view I', and x i′ =x i -d,y i′ =y i , the pixel initial matching cost between...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More