

Method used for measuring pose of non-cooperative target based on complete light field camera
A non-cooperative target and pose measurement technology, which is applied in the field of 3D vision target pose measurement, can solve the problems that cannot be eliminated, affect the real-time measurement, and the measurement distance is short.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
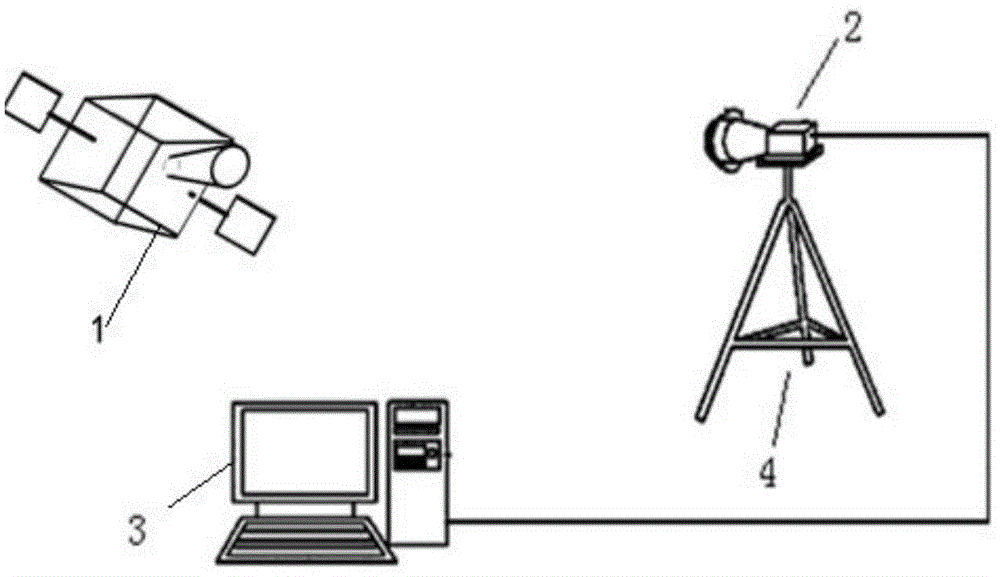
[0083] In this embodiment, a non-cooperative target pose measurement method based on a full light field camera is applied to a non-cooperative target pose measurement system based on a full light field camera, see figure 1 The system consists of a non-cooperative target 1, a full-light-field camera 2, a PC 3 for the pose measurement data processing system, and a camera holder 4 for fixed installation of the full-light-field camera 2; the non-cooperative target 1 is located at the angle of view of the full-field camera 2. Within the range, the non-cooperative target includes the star and arrow docking ring; the star and arrow docking ring on the non-cooperative target is used as the identification object, and the star and arrow docking ring on the non-cooperative target is a circular feature;
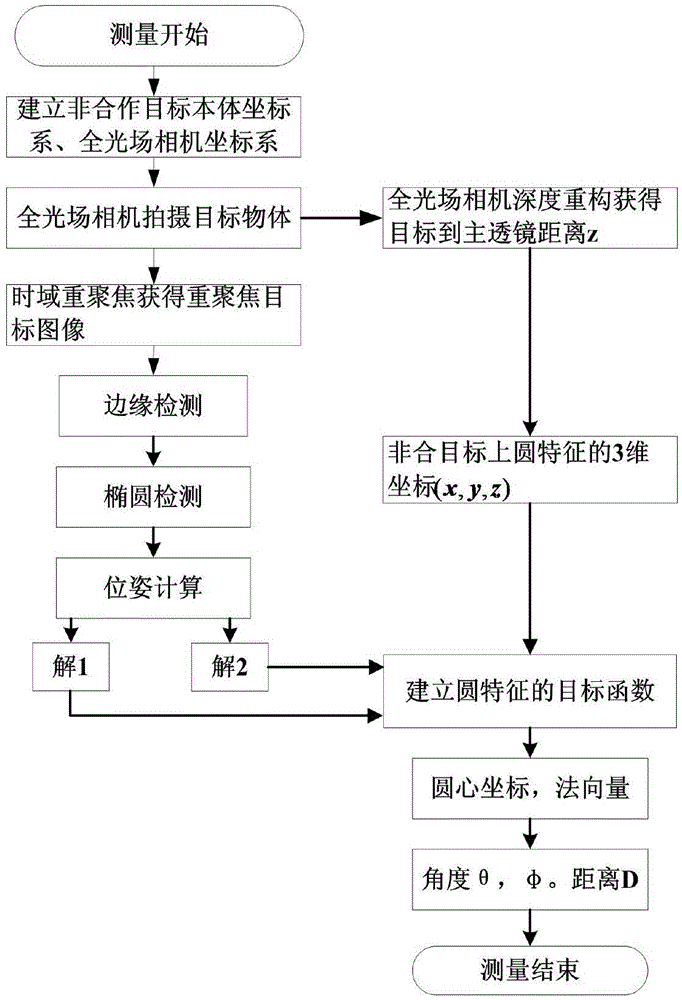
[0084] See figure 2 , The non-cooperative target pose measurement method based on the full-field camera is as follows:
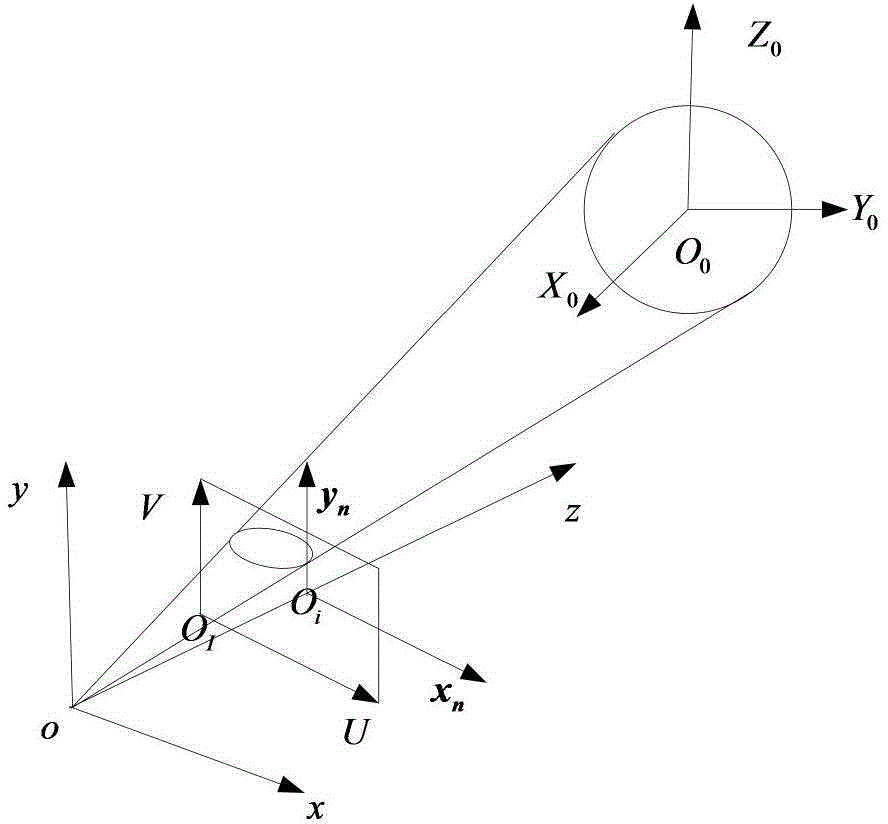
[0085] Step 1, such as image 3 As shown, take the center of the circ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More