Intelligent robot inspection system for city underground railway detection
A technology of intelligent robots and underground rails, applied in two-dimensional position/channel control and other directions, can solve problems such as difficulty, waste of manpower and time, and difficulty in emergency command and dispatch, so as to reduce operating costs, eliminate labor intensity, and improve The effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
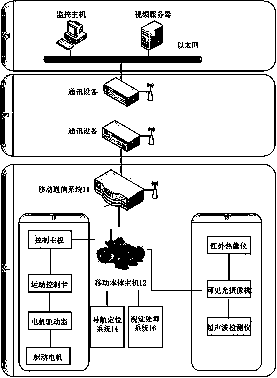
[0012] see figure 1 , an intelligent robot inspection system for urban underground track detection, including a mobile body system 1, a base station system 2, a communication network system 3 connecting them, and a controller for controlling the operation of the mobile body system. .
[0013] The mobile body system 1 is the mobile carrier and information acquisition control carrier of the entire robot system, including a mobile communication system 11, a mobile body host 12, a mobile motion control system 13, a navigation and positioning system 14, an information detection system 15, and a vision processing system. 16.
[0014] The mobile communication system 11 communicates wirelessly with the communication network system 3; the mobile body host 12 is connected with the mobile communication system 11, and the walking route of the robot and the equipment to be detected can be pre-set near the city track by the mobile body host 12
[0015] mark point. The mobile motion contr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com