

Parking system path planning method based on dynamic time windows
A technology of parking system and dynamic time, applied in the field of path planning of parking system based on dynamic time window
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0088] The content of the present invention will be described in detail below in conjunction with the accompanying drawings, but the present invention is not limited thereto.
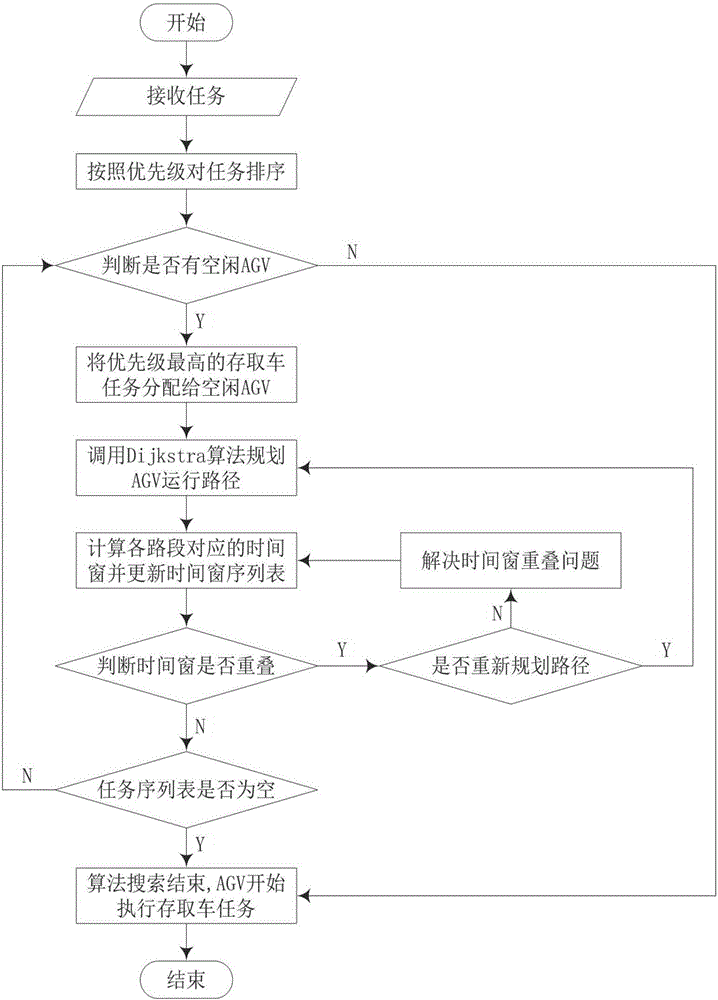
[0089] The present invention provides a parking system path planning method based on a dynamic time window, figure 1 Shown is the algorithm implementation flow chart of the present invention, and this flow chart describes the solution process of multi-AGV conflict-free optimal path, specifically includes the following steps:
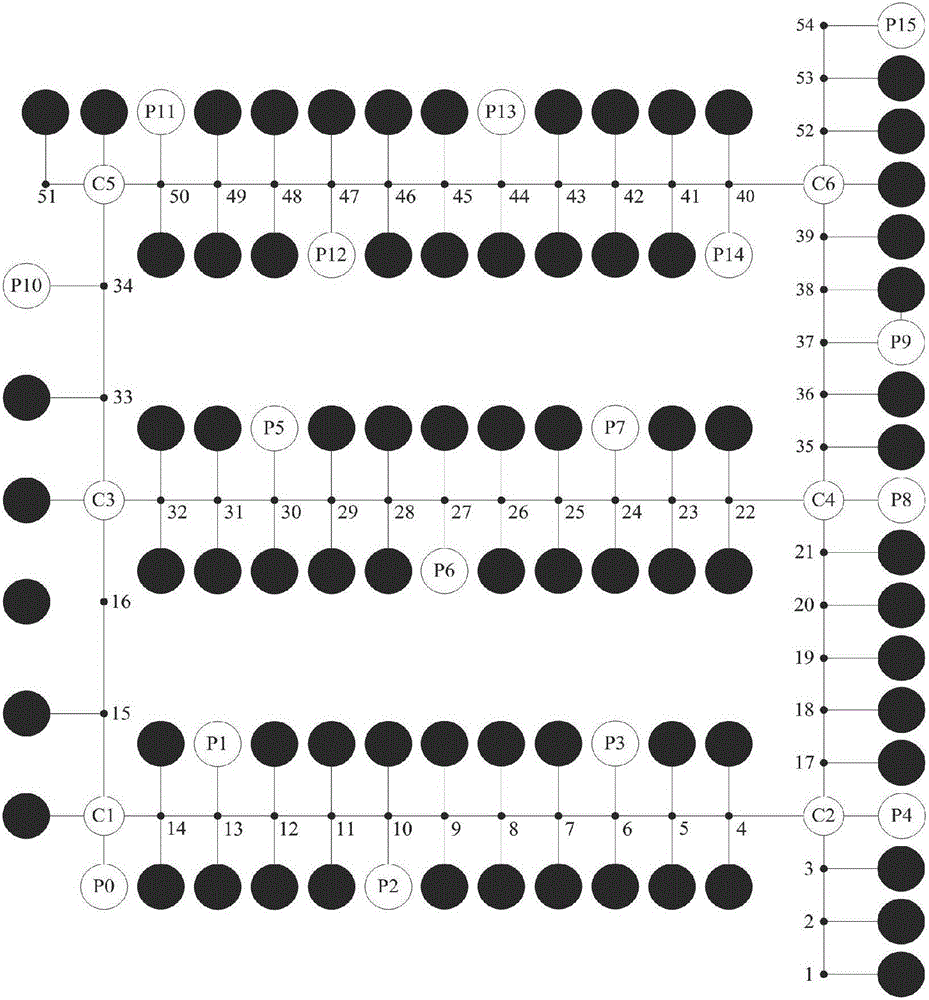
[0090] Step S1: Use the topology method to create the working environment model of the AGV in the smart garage. The specific steps include:
[0091] Step S11: The traffic road network and AGV in the environment model are processed as follows: ① The AGV running lane is a single-lane bidirectional mode, and only one AGV can be accommodated in the width direction; ② The AGV in the system can only accept one AGV in the same time period During the execution of the task, other tasks as...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More