

Wheel-leg type stair sweeping robot
A technology for cleaning robots and corridors, applied to cleaning carpets, floors, machine parts, etc., to achieve the effects of ensuring efficiency and quality, enhancing flexibility, and improving the stability of climbing stairs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
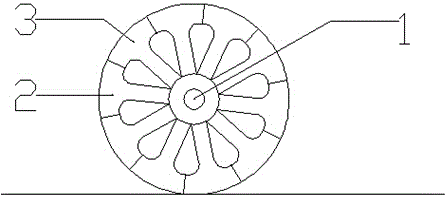
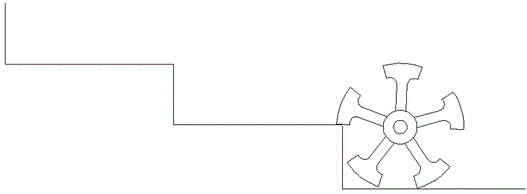
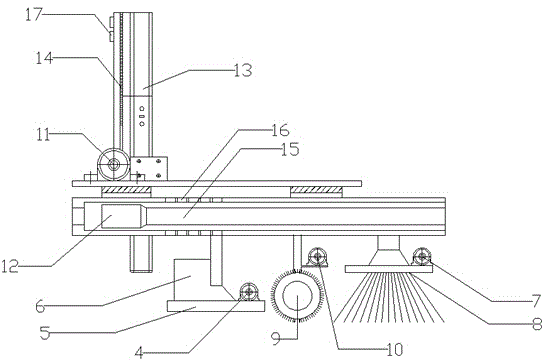
[0039] Such as Picture 1-1 and Figure 1-2 As shown, the wheel-leg type multi-functional corridor cleaning robot designed by the present invention includes a spoke-type wheel set dual-purpose for leveling roads and climbing stairs; a wheel-leg combination mechanism is designed; rotating brush cleaning, rolling brush cleaning, and dust suction are designed. Cleaning integrated cleaning module; designed the lifting mechanism and translation mechanism used to control the operation of the cleaning device; designed the control system based on STM32. The change state of level road state and climbing stair state is shown in the figure.
[0040] In the present invention, the four wheels of the spoke-type wheel set are all composed of a ball bearing drive motor 23, two spokes 2, 3 and a thrust ball bearing 1 in the middle, and the outer spokes of the front wheel and the rear wheel are driven by the motor. 3 rotation, the wheel set can switch the shape of the wheel set according to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More