

Self-adaption path tracking method of inspection robot
An inspection robot and path tracking technology, applied in the field of inspection robots, can solve the problems of poor reliability of running path tracking, difficult for operators to discover in time, and inability to quickly and intuitively determine the current inspection section of the robot, and achieve equipment monitoring efficiency. High, flexible inspection methods, strong anti-electromagnetic interference effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described in detail below in combination with specific embodiments. However, it should not be understood that the scope of the above subject matter of the present invention is limited to the following embodiments, and all technologies realized based on the content of the present invention belong to the scope of the present invention.
[0033] In order to intuitively determine the current running path of the robot and reliably track the running position of the robot, the present invention proposes an adaptive path tracking method for the inspection robot, which will be described in detail below with reference to the accompanying drawings.
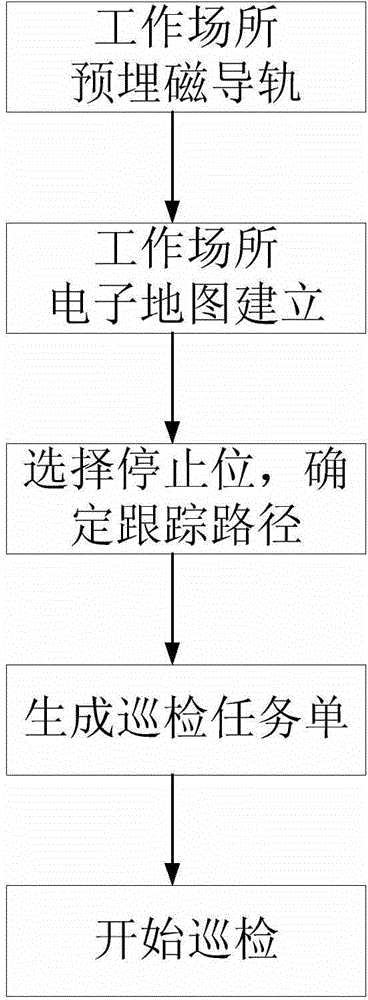
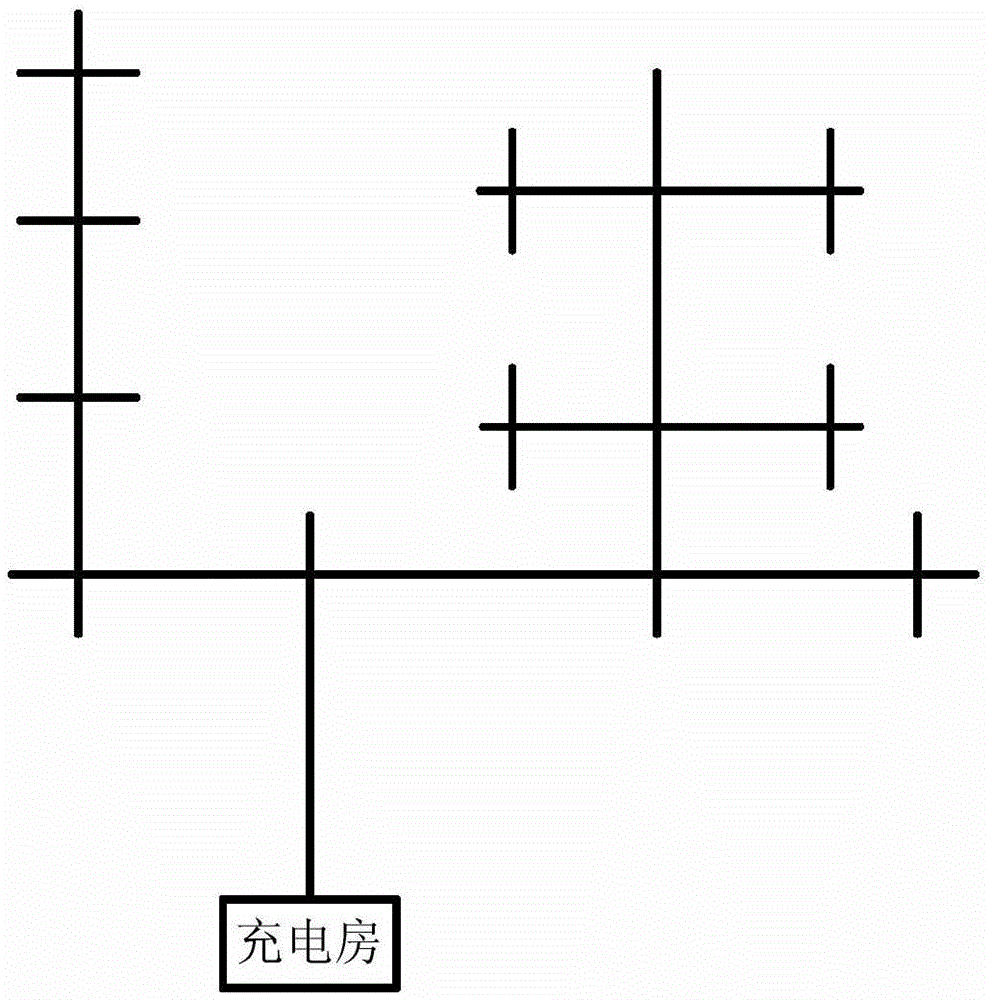
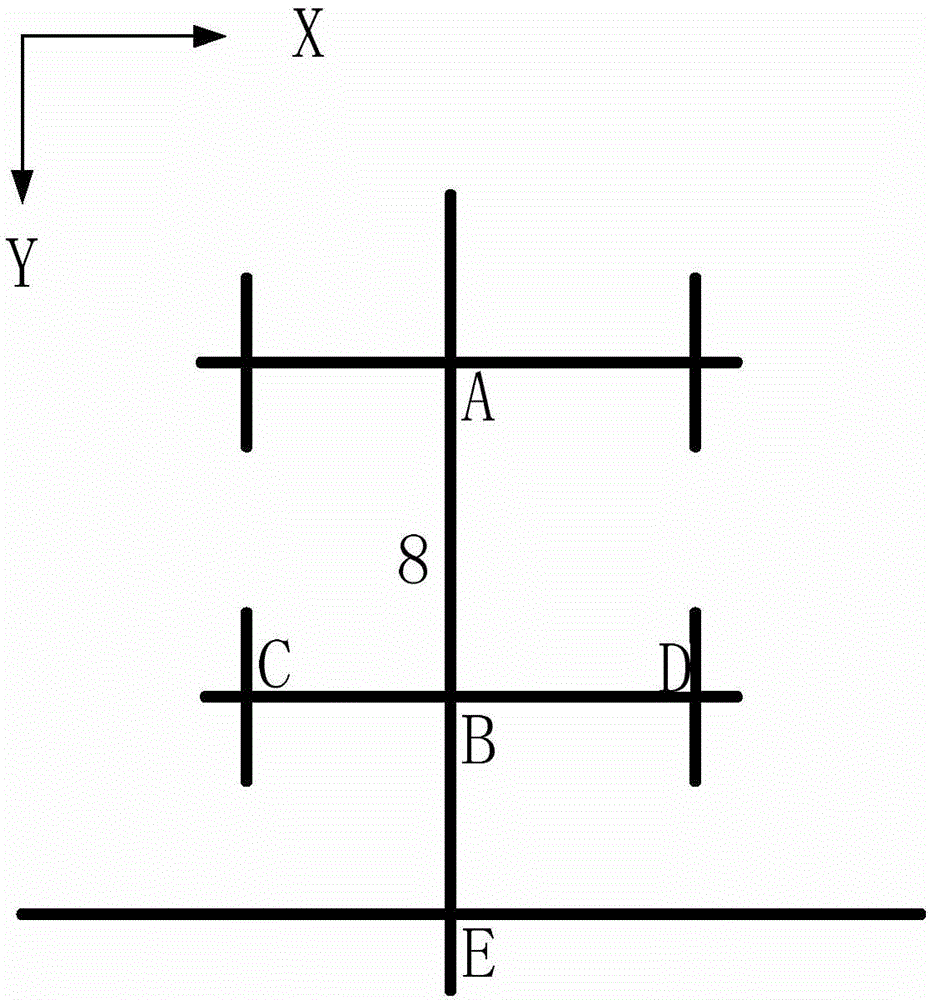
[0034] Please refer to figure 1 , the method of the present invention first paves a plurality of magnetic guide rails for the navigation robot to walk in the workplace, and the plurality of magnetic guide rails constitute a plurality of actual running paths (or inspection sections, the same below...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More