

A real-time control method of camera robot based on teleoperation
A real-time control, robotics technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of network delay, incomplete network transmission data, etc., to ensure the quality and effect, and the effect of stable control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
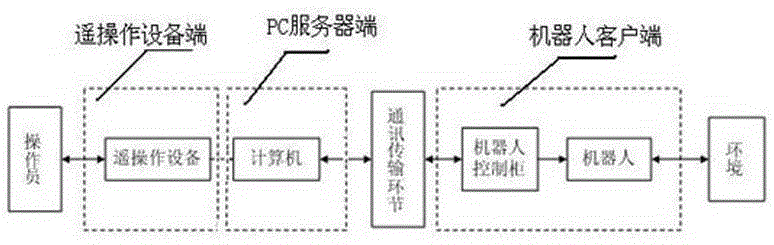
[0046] A real-time control system of camera robot based on teleoperation (such as figure 1 shown), including: a remote operation device end, a PC server end, a robot client end, and a communication transmission link; the remote operation device end is provided with a remote operation device, and is connected to a PC server end; , and connect with the robot client through the communication transmission link; the robot client is provided with a robot control cabinet and a robot, one end of the robot control cabinet is connected with the communication transmission link, and the other end is connected with the robot.
[0047]The teleoperation device side parses and processes various motion command signals of the operator to the teleoperation device into motion command data readable by the robot, and sends them to the PC server; the PC server receives the motion command data of the teleoperation device and communicates with the robot Control cabinet communication: the robot client...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More