

Industrial robot operation four-segment method collaborative planning method
A technology of industrial robots and operating sections, applied in the direction of electrical program control, digital control, etc., can solve the problems of increasing energy consumption, affecting production efficiency, low speed, etc., and achieve the effect of improving service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Attached below figure 1 The present invention will be further described.
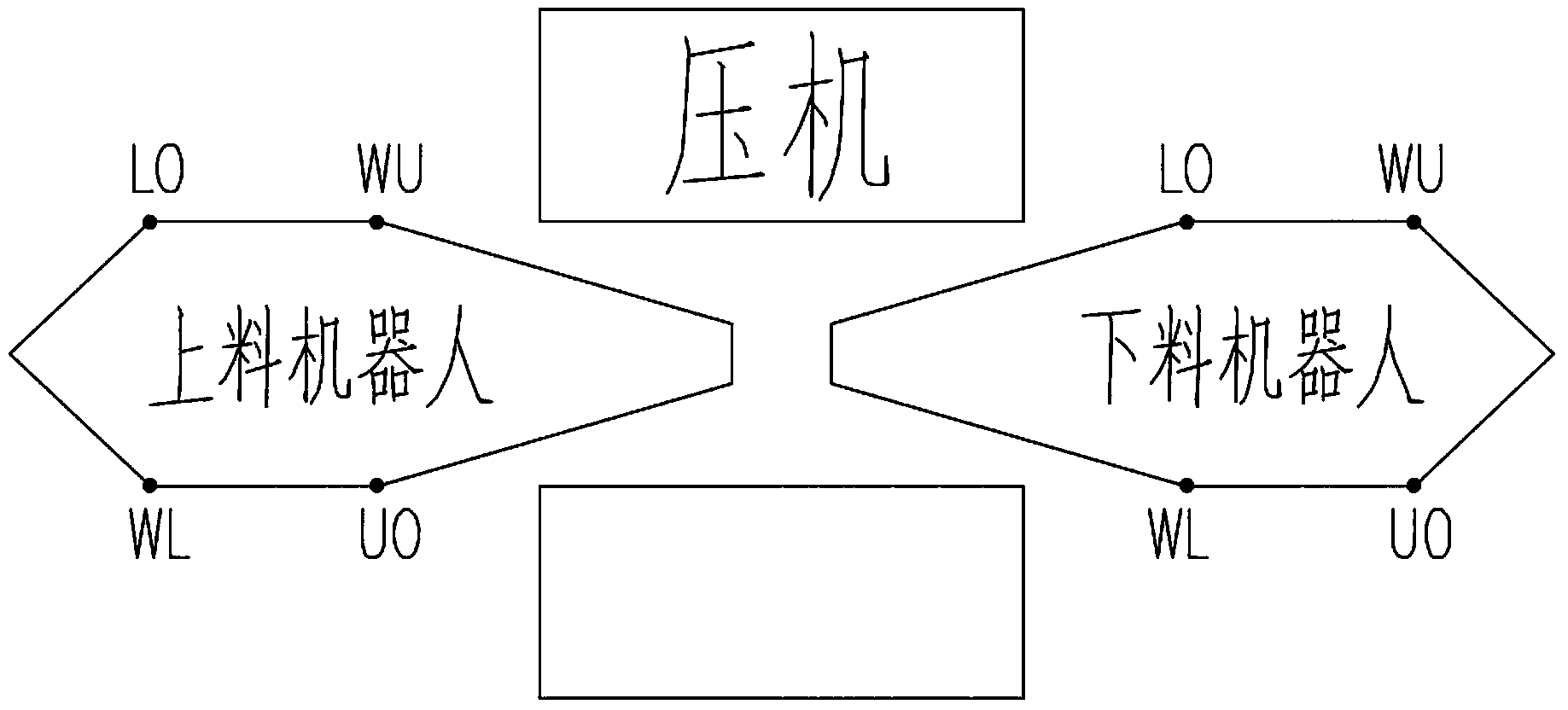
[0020] The collaborative planning method of the industrial robot operation four-stage method includes the following steps:
[0021] (1) The action sequence of the industrial robot is divided into the loading operation section (LO), the unloading robot carries the workpiece processed by the previous machine tool to the next machine tool (WU), and the industrial robot enters the next machine tool for loading operations (UO) and after the industrial robot completes the loading operation, it goes to the previous machine tool to prepare for the unloading (WL) four sections; (2) Calculate the trajectory of the industrial robot by the formula S=(v×v) / (2×acc) During the teaching, the distance S between the unloading and loading waiting point of the industrial robot and the machine tool in the two stages of the unloading operation section (LO) and the industrial robot entering the next machine tool for l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More