

Full-automatic automobile washing device
A fully automatic, spray device technology, applied in the direction of vehicle exterior cleaning devices, etc., can solve the problems of weakening the spray head flushing effect, low work efficiency, reasonable lifting, etc., to solve the problem of serious waste of water and electricity, high car washing efficiency, and clean car washing. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
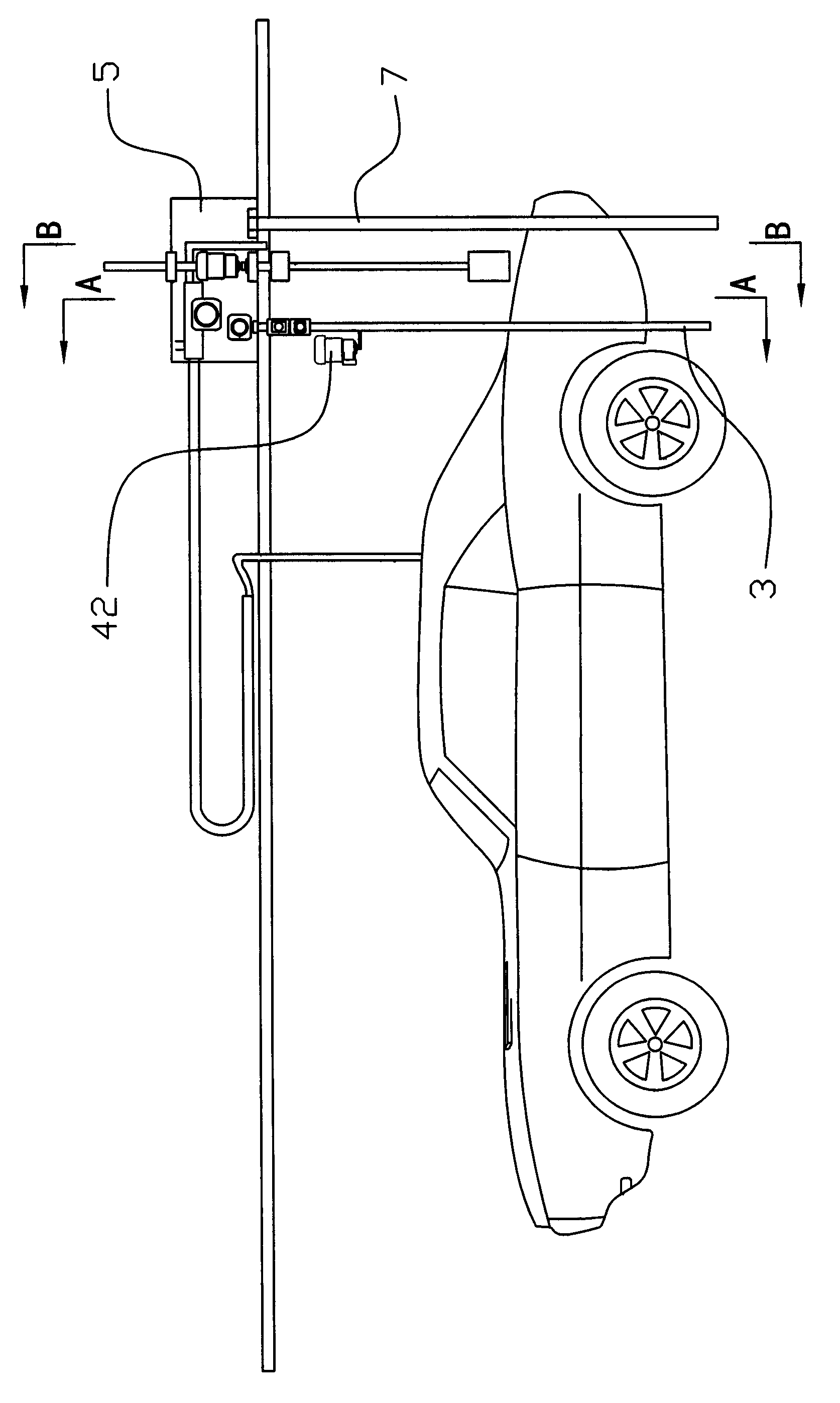
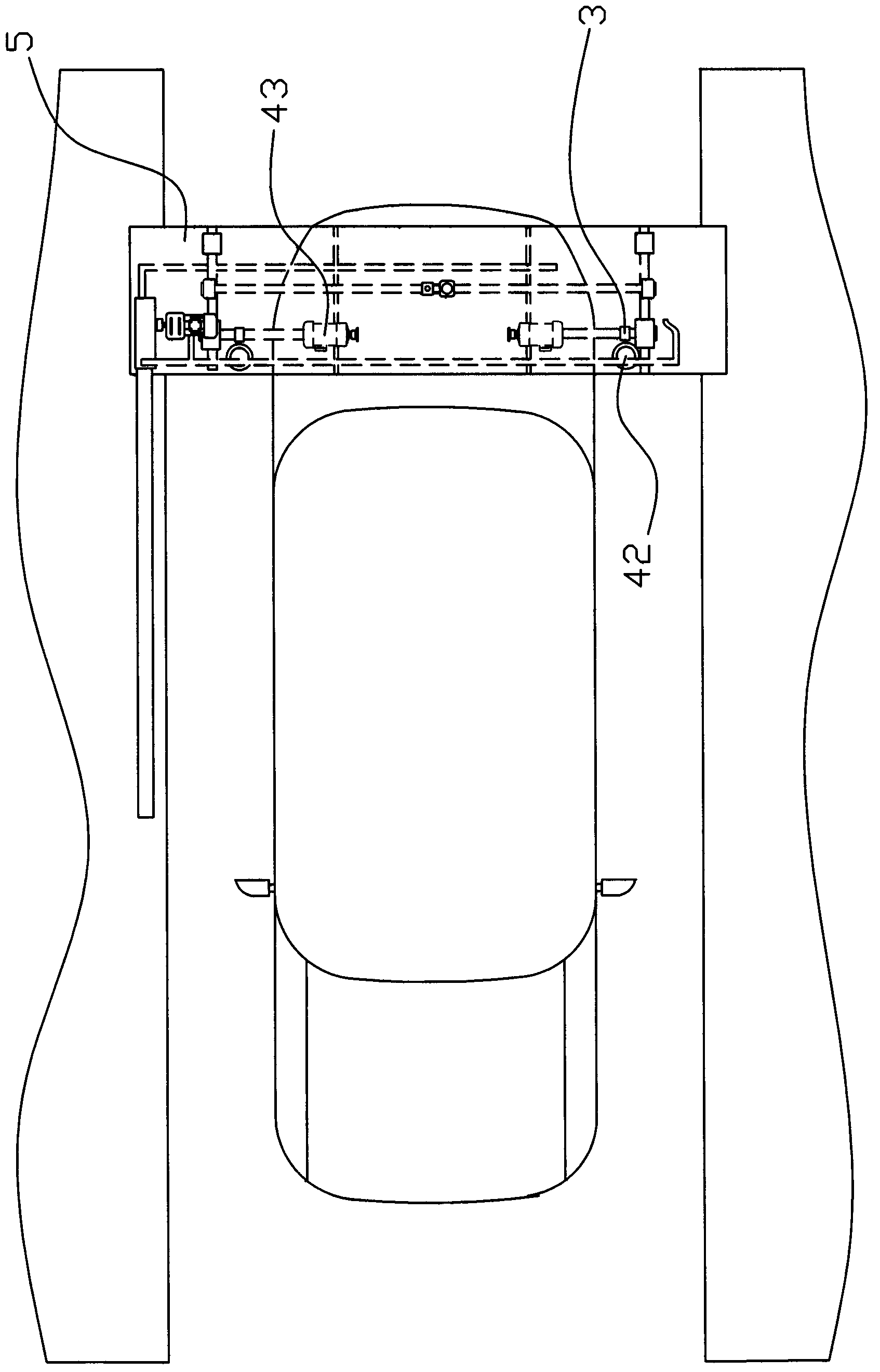
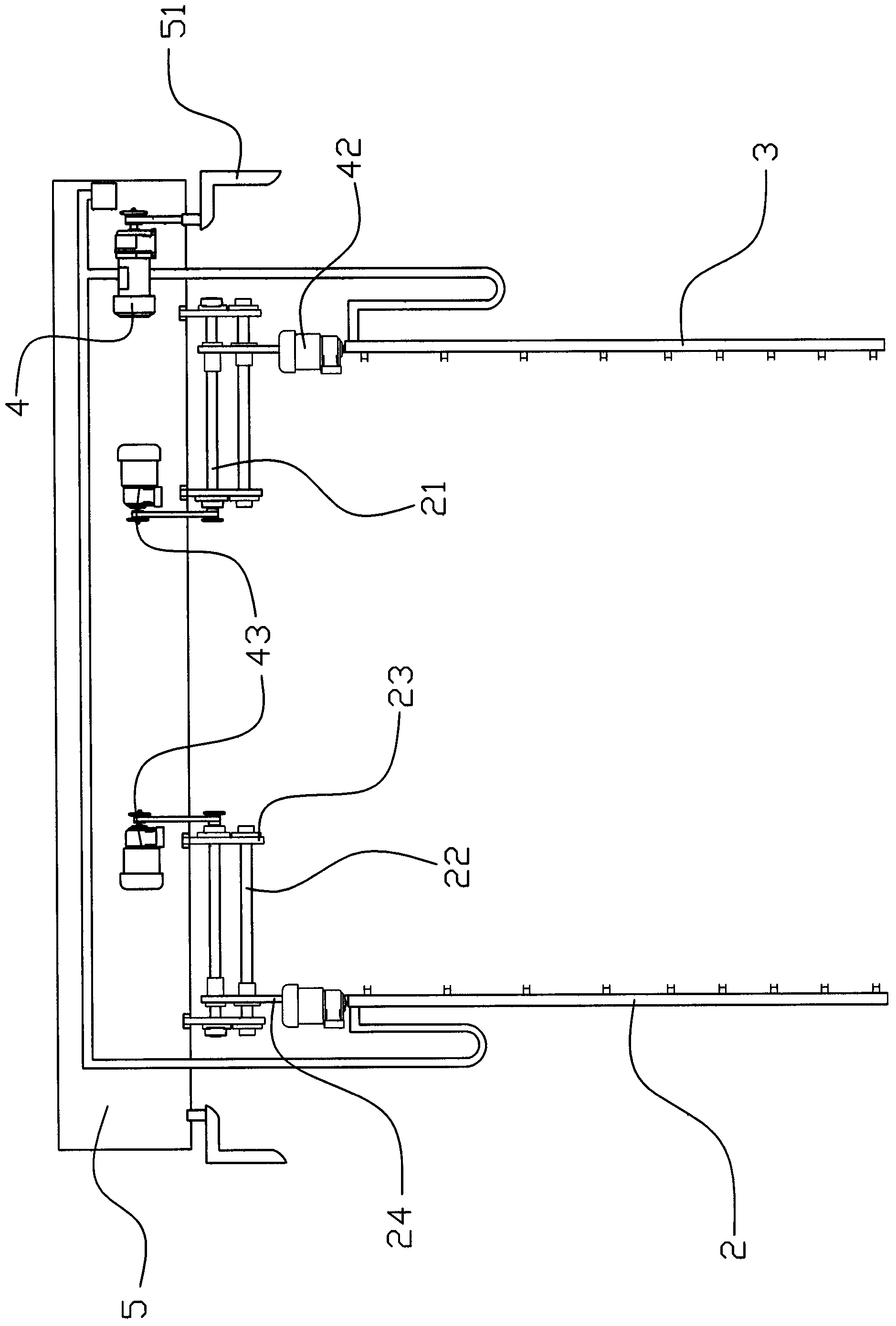
[0030] Such as Figure 1 to Figure 14 As shown, the fully automatic car washing device of this embodiment includes a spraying device, and the spraying device includes a top spray bar 1 arranged horizontally and a vertical spray bar arranged left and right, a left vertical spray bar 2 and a right vertical spray bar. The spray bar 3 is respectively distributed with a plurality of spray nozzles 6 up and down, and the nozzles of the left and right vertical spray bars 2 and 3 are arranged oppositely. The bar 2, the right vertical spray bar 3 and the top spray bar 1 are respectively provided with switching mechanisms that enable the nozzle 6 to spray air or water, and the left and right vertical spray bars 2, 3 and the spray heads 6 on the top spray bar 1 It can be connected with high-pressure water source and high-pressure air source. The switchin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More