

Cleaning robot obstacle avoidance system and method
A cleaning robot and obstacle avoidance technology, applied in the field of cleaning robots, can solve problems such as damage to the cleaning robot, damage to furniture, and no solution to avoidance, etc., to achieve the effect of improving work efficiency, prolonging service life, and saving cleaning time.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
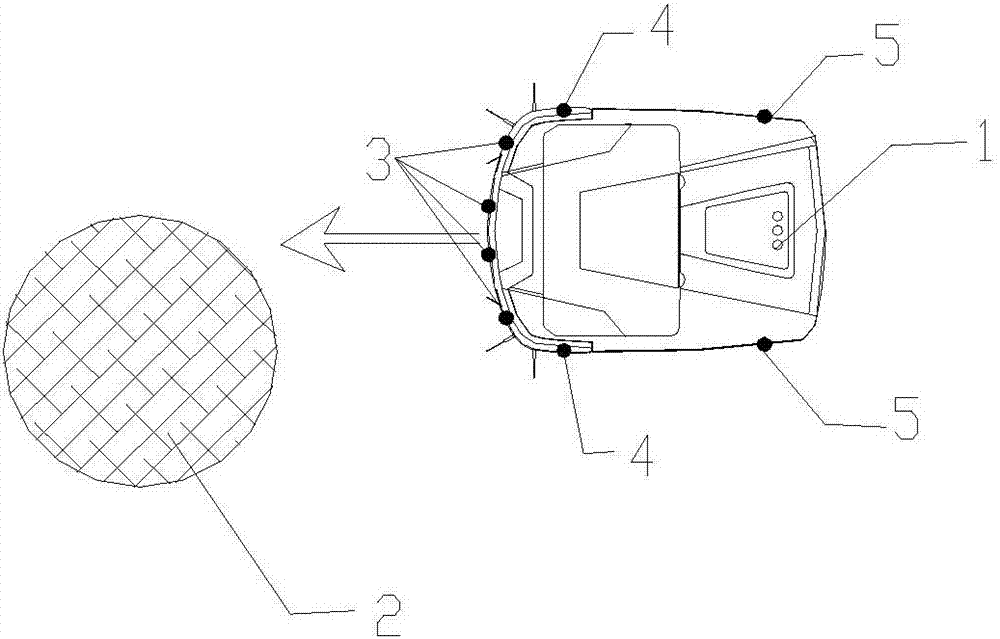
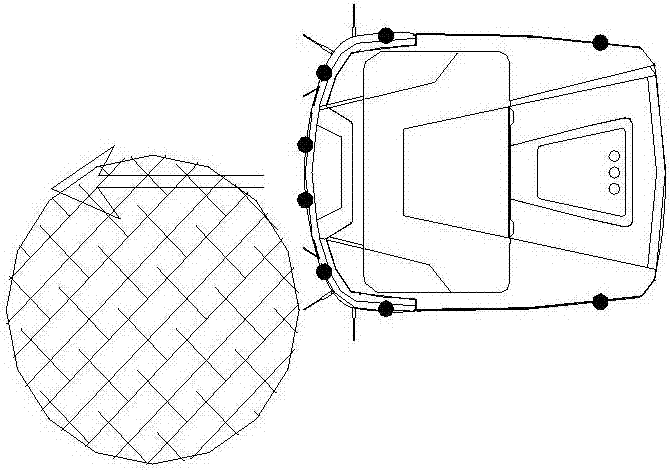
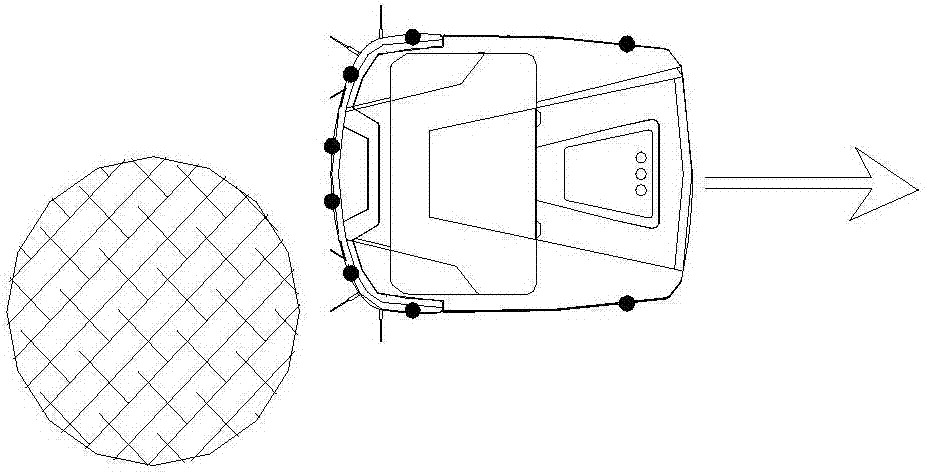
[0040] Embodiment 1, with reference to Figure 1-Figure 3b As shown, when the obstacle is on the left side of the cleaning robot 1, when the cleaning robot 1 is going to approach the obstacle 2 while the cleaning robot 1 is moving, when it enters the effective range detected by the obstacle avoidance unit, the central control unit will receive The distance detection signal, and then give the feedback command of the cleaning robot 1. At this time, the cleaning robot 1 will retreat a certain distance according to the program setting, and then start turning right to avoid obstacles, and then go straight. This process may be repeated many times Correction: After the cleaning robot 1 avoids the obstacle on the side, it moves forward in the oblique direction. When the second distance sensor 4 that moves to the right side detects the obstacle, it cannot turn left to correct the direction at this time, and it needs to continue in the oblique direction. Go straight, and after the third...
Embodiment 2
[0041] Embodiment 2, with reference to Figure 4 As shown, when the cleaning robot 1 enters some narrow passages or corners, when the cleaning robot 1 cannot turn around to get out of trouble, it can exit backwards. At this time, the distance sensors on both sides are used to correct the route until the cleaning robot 1 exits the narrow passage smoothly. passages or corners without always bumping into walls or furniture.
[0042] The following provides a comparison with a conventional cleaning robot in the case of cleaning the same space through the system and method of the present invention as follows:
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More