

An underactuated crawler wheel mechanism
A crawler-type, under-actuated technology, applied in the field of robotics, can solve the problems that the adaptability needs to be strengthened, and achieve the effects of reducing cost and energy consumption, compact system, and strong obstacle-surpassing ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
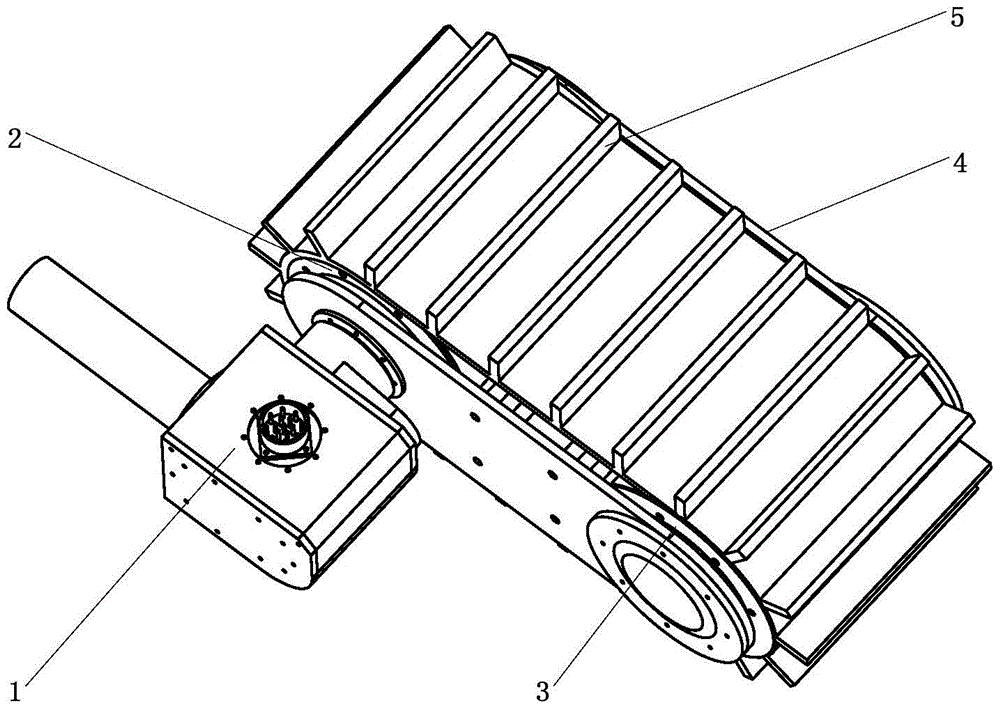
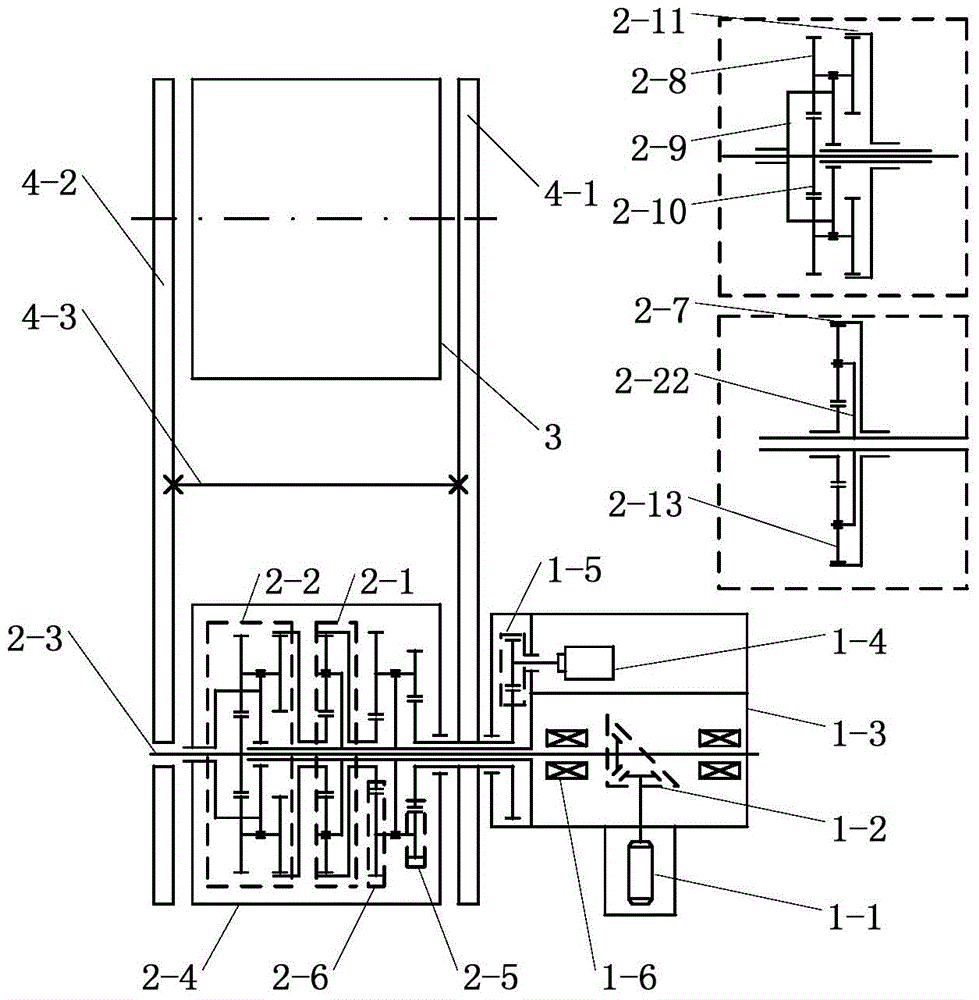
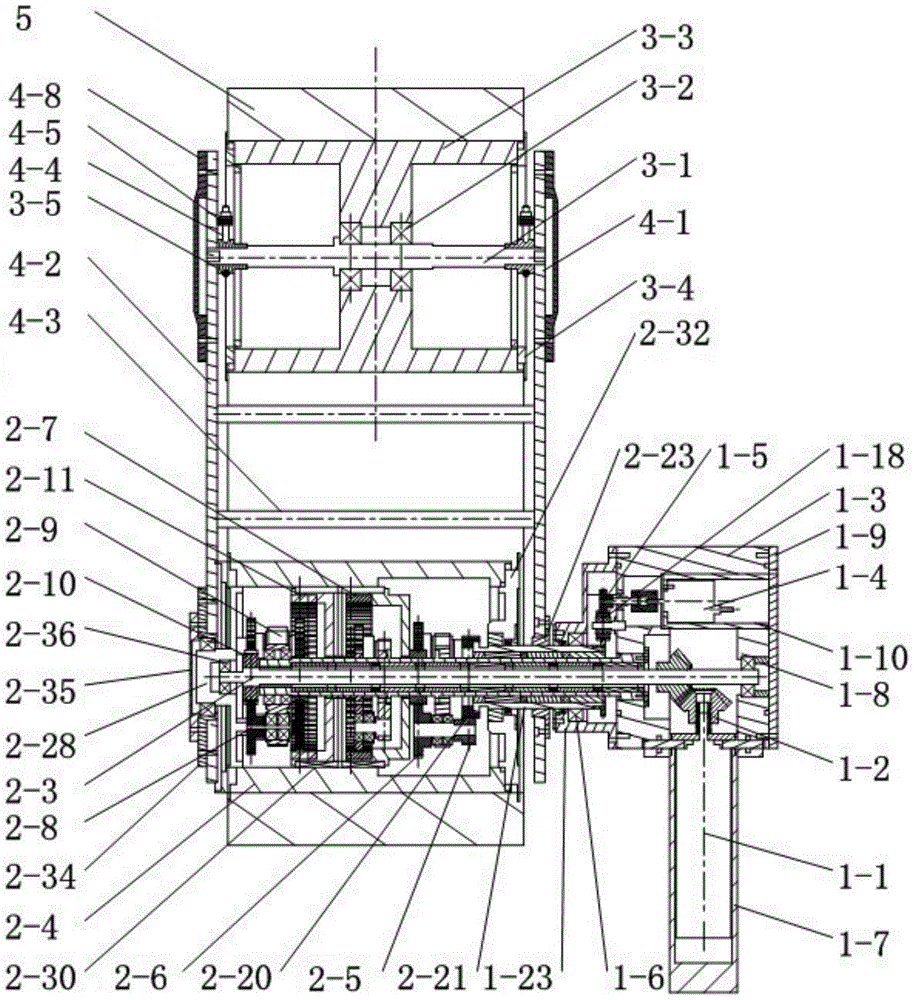
[0029] Such as figure 1 , 2 , 3 and 6, an underactuated crawler wheel mechanism, including a driving assembly 1, a driving wheel assembly 2, a driven wheel assembly 3, a swing arm assembly 4 and a track 5. The driving assembly 1 drives the driving wheel assembly 2; the driving wheel assembly 2 and the driven wheel assembly 3 are connected through the crawler belt 5 to drive the driven wheel assembly 3 to rotate; the driving wheel assembly 2 and the driven wheel assembly 3 are connected through the swing arm assembly 4 to drive the driven wheel assembly 3 swings.
[0030] Such as image 3 , 4As shown in and 5, the driving assembly 1 includes a driving motor 1-1, a transmission bevel gear 1-2, a motor box 1-3, an encoder 1-4, a third gear 1-5, a first connection plate 1-11, an electrical Joint 1-13, the third gear installation shaft 1-16, the fourth ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More