

Six-axis robot
A six-axis robot and output shaft technology, applied in the field of robotics, can solve the problems of complex driving mechanism, slow action speed, inflexibility and other problems, and achieve the effects of small size, fast action, and weight reduction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
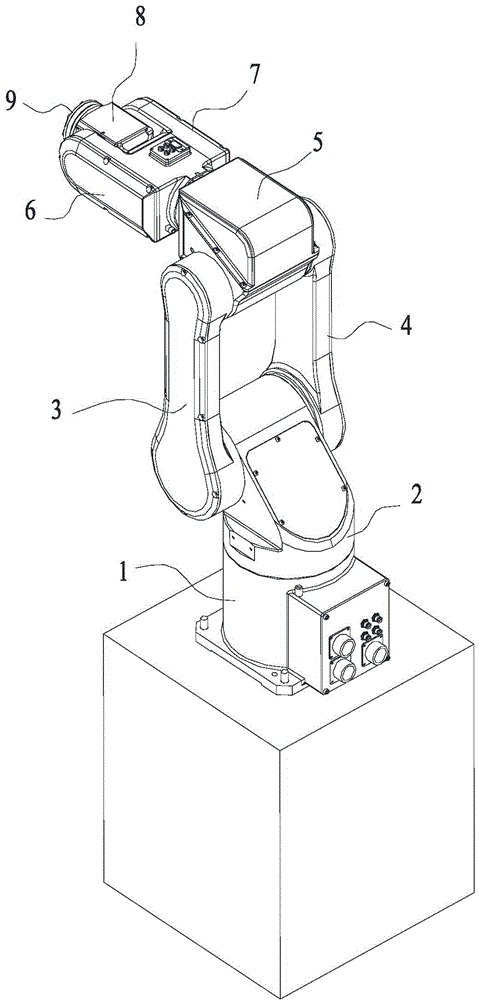
[0029] Such as figure 1 A six-axis robot shown includes: a base 1, a swivel base 2, a supporting arm 3, a shoulder joint 5, a supporting forearm 6 and a wrist joint 8, wherein:
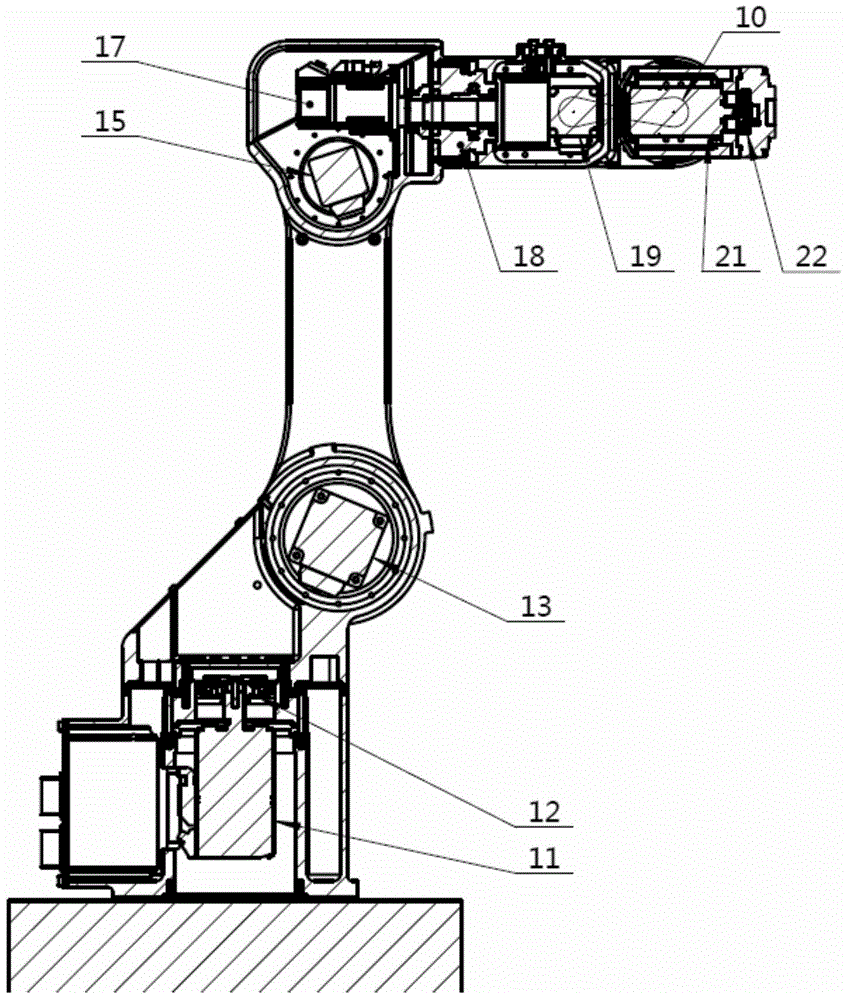
[0030] Such as figure 2 As shown, a base 1, a first servo motor 11 is fixed in the cavity of the base 1;
[0031] Such as figure 2 As shown, the swivel seat 2, the lower end of the inner cavity of the swivel seat 2 is provided with a first harmonic reducer 12, the wave generator of the first harmonic reducer 12 is fixedly connected with the output shaft of the first servo motor 11, the first The flexible wheel of the harmonic reducer 12 is fixedly connected to the base 1, the rigid wheel of the first harmonic reducer 12 is fixedly connected to the swivel base 2, and the swivel base 2 is horizontally hinged to the base 1 through the first harmonic reducer 12, the A second servo motor 13 is fixed on the upper end of the inner cavity of the swivel base 2; driven by the first servo motor 11, the swiv...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More