

Small carrier visual navigation method based on Meanshift algorithm
A visual navigation and algorithm technology, applied in the field of visual navigation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
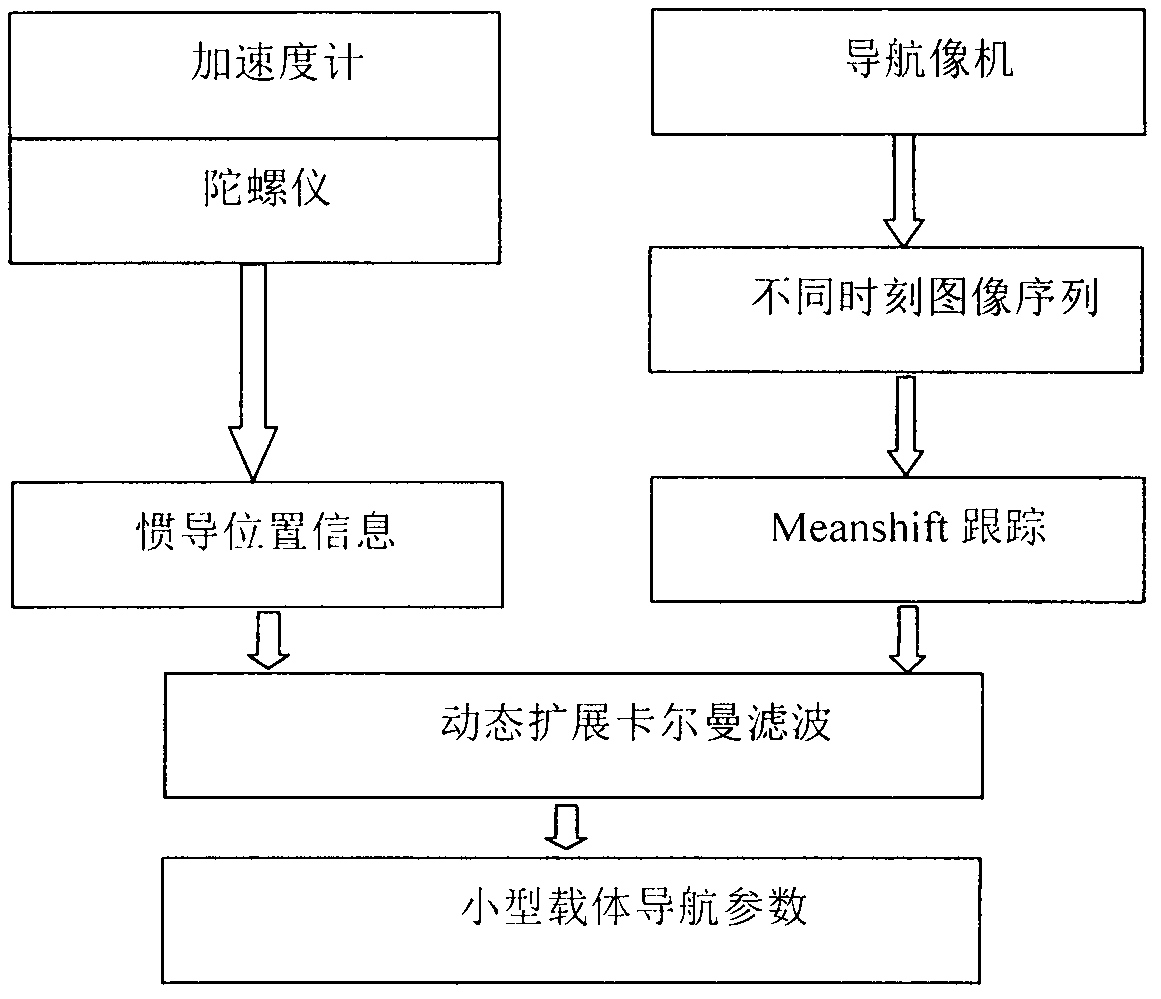
[0008] The specific design ideas of the main links are as follows:
[0009] (1) Natural feature extraction and tracking based on Meanshift
[0010] Using the position information of the extracted and tracked target, the position information of the visual sensor is back calculated, which involves the superposition of the position information of different feature points.
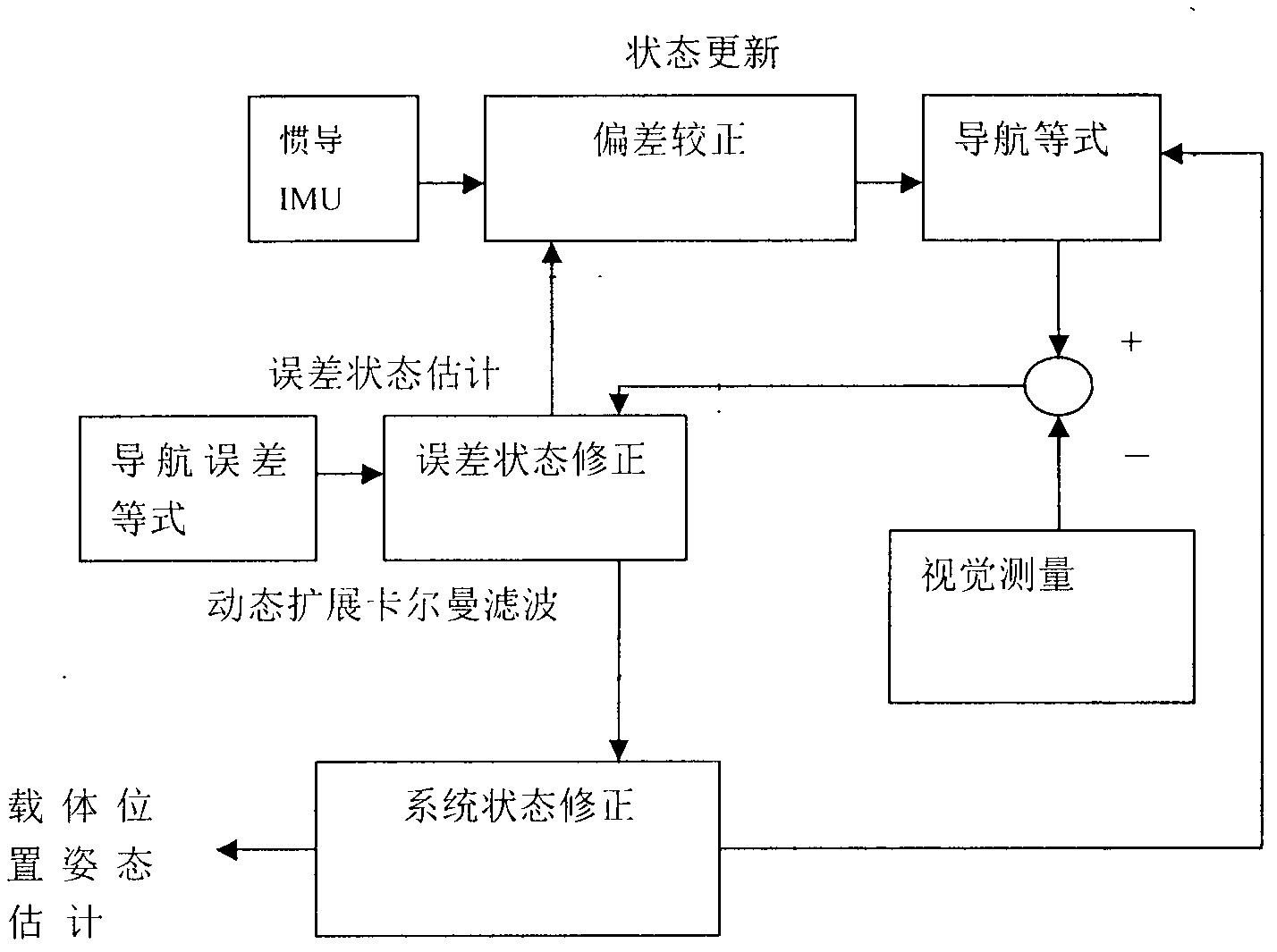
[0011] (2) Data Fusion Based on Dynamic Extended Kalman Filter
[0012] Using dynamic extended Kalman filter to fuse visual information to correct measurement error of inertial navigation system. Define the direction angle of the small carrier as (φ, θ, ψ), and the gyro bias as (b p , b q , b r ), the visual information is (φ v , θ v , ψ v ), the system state variable selection x=[φ θ ψ b p b p b r ] l , the observation variable selection [φ v θ v ψ v ], establish the state equation and observation equation of the system, use the dynamic extended Kalman filter recursive equation to estimate t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More