

Serial inertial navigation moving base alignment method based on switching type self-adaptive control compass
A technology of self-adaptive control and alignment of moving bases, applied to measuring devices, instruments, etc., can solve the problems of control loop runaway and time-consuming
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
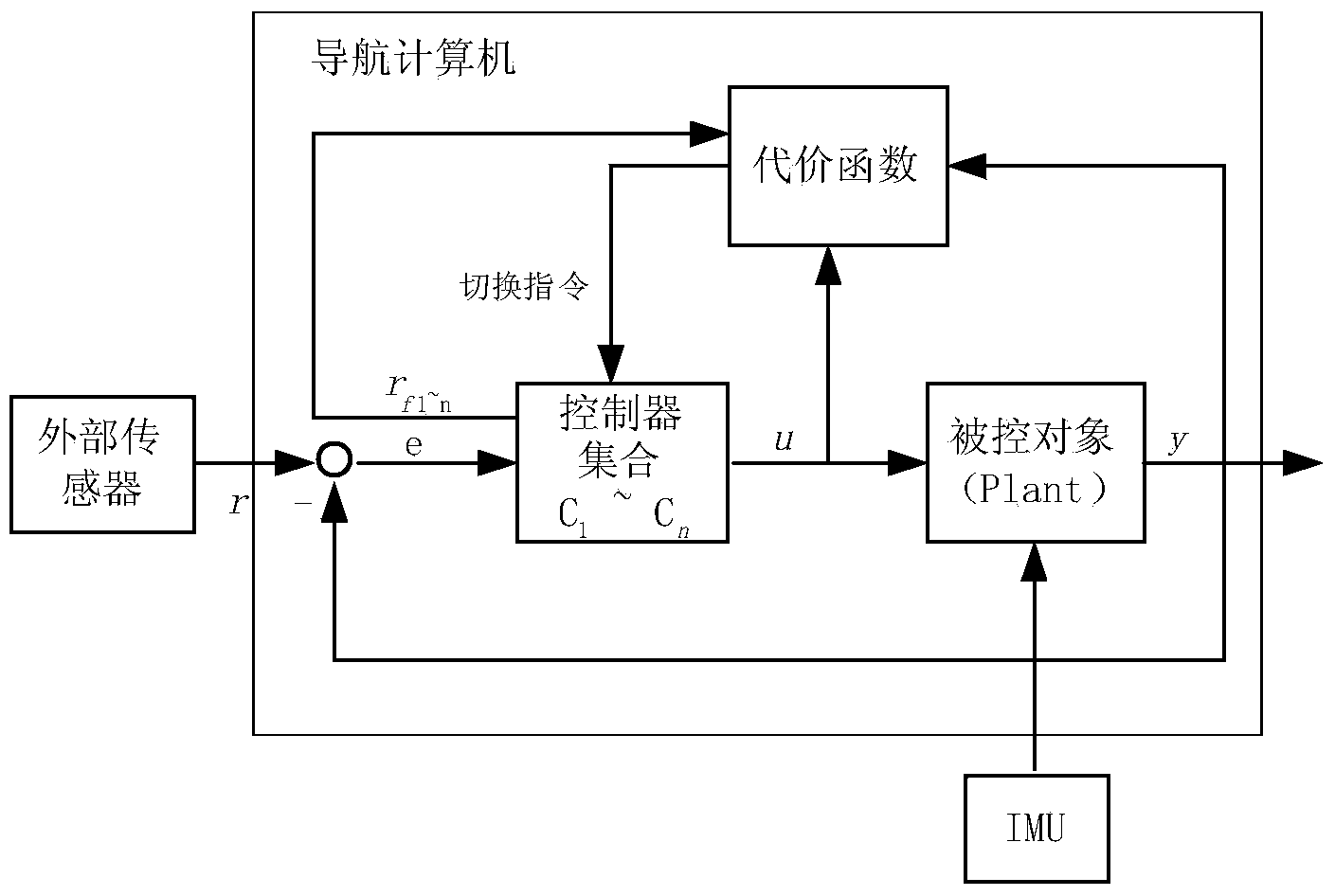
[0035] Such as figure 2 As shown, the present invention proposes a method for aligning a strapdown inertial navigation base based on a switchable adaptive control compass. The method includes the following steps:
[0036] Step S101, calculating controller parameters;
[0037] The controller parameters can be obtained by expanding the theoretical optimal value, and its calculation method is as formula (1):
[0038] K 1 = K 4 = 2 σ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More