

On-line joint servo system parameter identification and controller parameter optimization method
A servo system and parameter identification technology, which is applied in the direction of program control manipulator, manufacturing tools, electrical testing/monitoring, etc., can solve the problems of extremely high requirements for storage space and computing speed, ignorance, and unsuitability for industrial promotion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
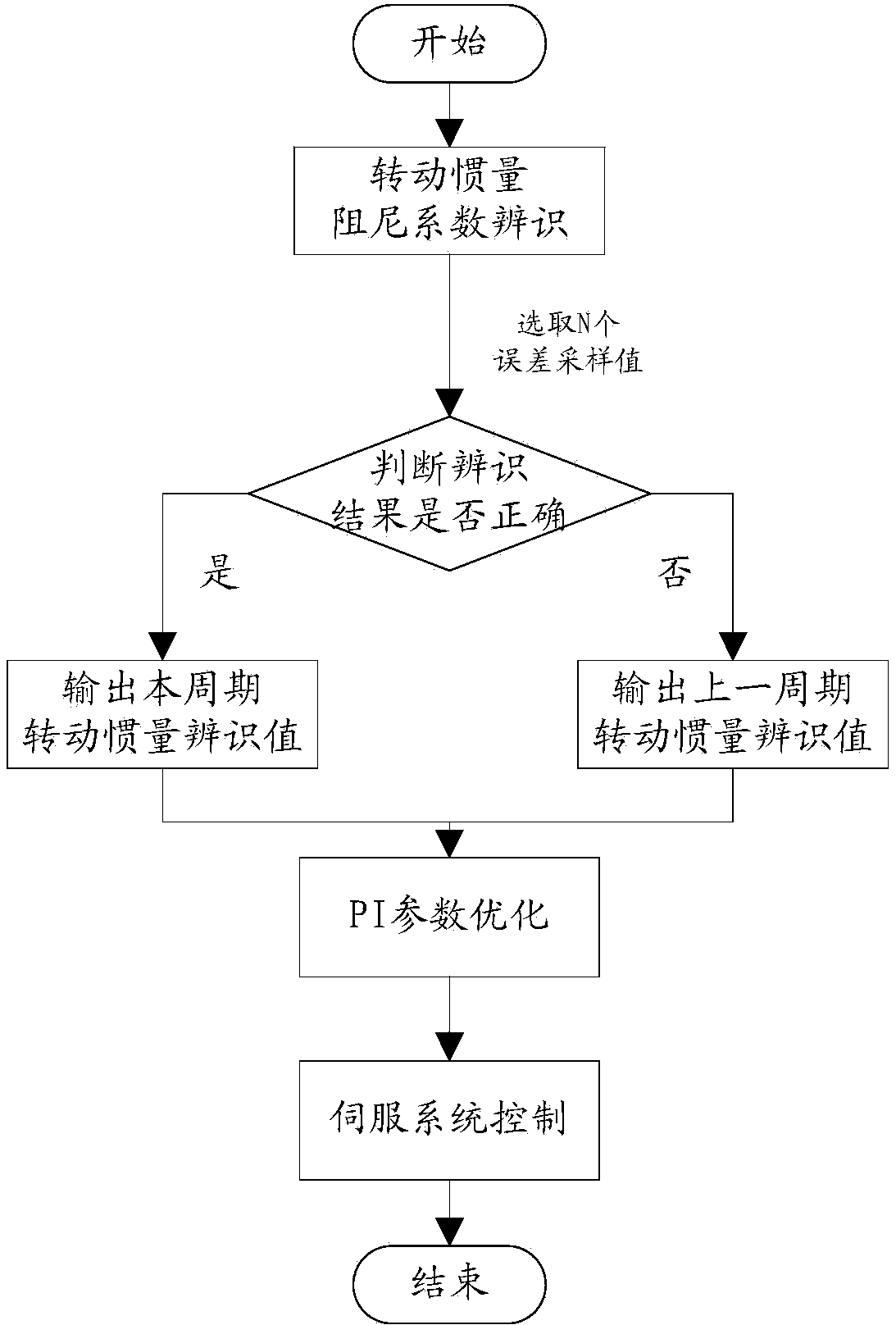
[0038] In order to better understand the technical solutions of the present invention, the embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. The flow chart of parameter identification and control parameter optimization is as follows: figure 1 shown.
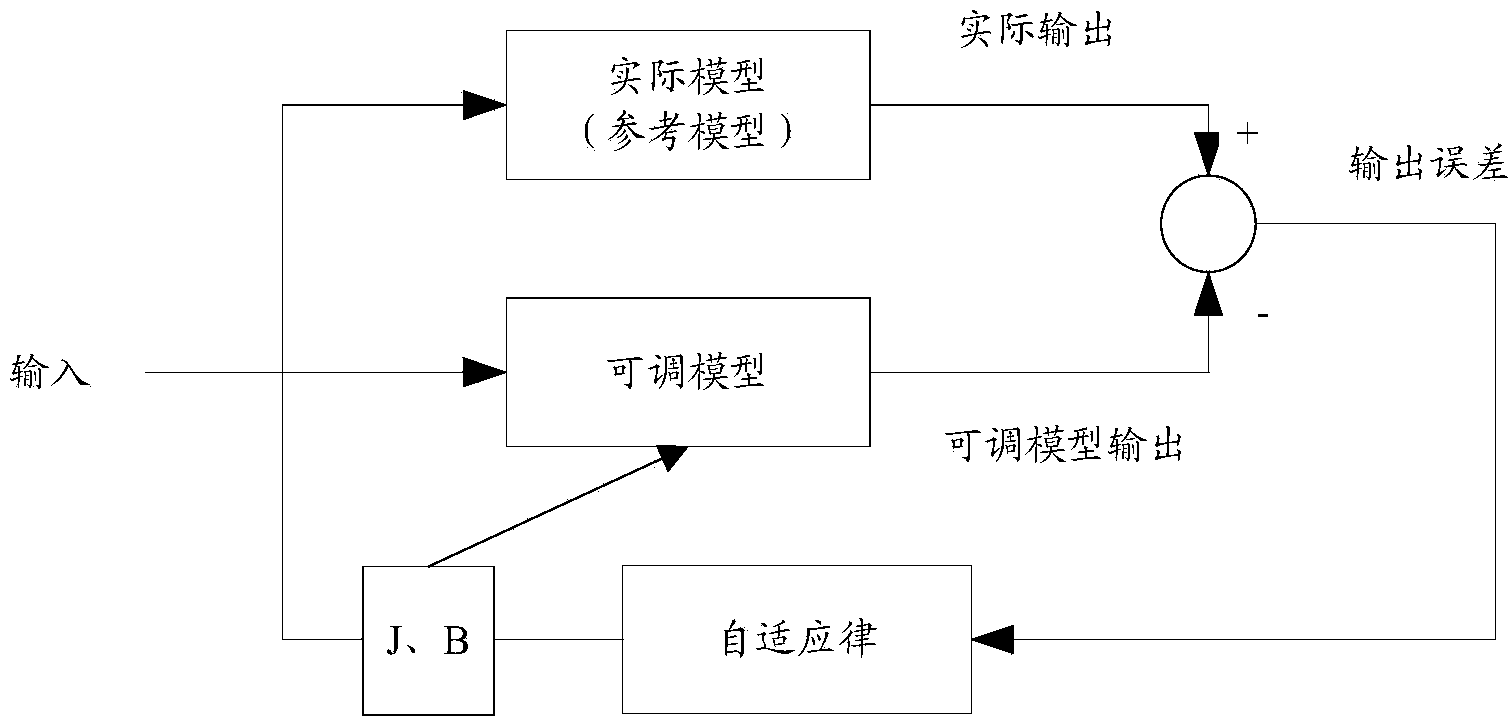
[0039] first as figure 2 The moment of inertia and damping coefficient are identified as shown, according to the mechanical motion equation of the motor:
[0040] T e - T L = J dω dt + Bω - - - ( 1 )
[0041] Motor torque T e (N m), the motor load torque is T L (N m), the sum of the moment of inertia of the motor rotor and the load J(Kg m 2 ), motor speed ω(r / min)
[0042] Formula (1) is discretized to get:
[0043] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More