Obstacle-surmounting reconnaissance robot
A technology of robots and steering gears, which can be used in the direction of vehicles that can be converted into airplanes, and can solve problems such as inability to take off and land vertically, and poor performance of obstacle surmounting on the ground.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
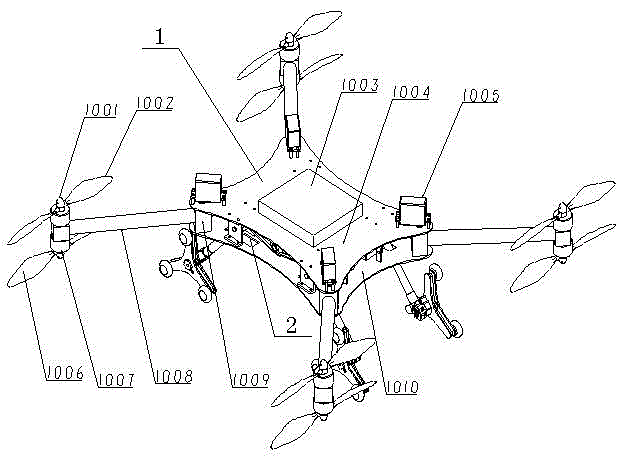
[0015] The upper mounting plate 1004 of the flying part 1 is fixedly connected with the lower mounting plate 1010 of the land part 2 through the leg pipe clamp support 2003 .
[0016] exist figure 1 Among them, bullet fastening nut 1001, positive propeller 1002, electric control box 1003, upper mounting plate 1004, steering gear 1005, reverse propeller 1006, brushless motor 1007, propeller support tube 1008, propeller support tube clamp 1009, lower installation Board 1010.
[0017] The structure of the flight part 1 is: the electric control box 1003 is fixedly connected to the upper mounting plate 1004, the steering gear 1005 is fixedly connected to the upper mounting plate 1004, and the output shaft of the steering gear 1005 is connected to the propeller support pipe clamp 1009 through a key. The propeller support tube clamp 1009 is connected to the propeller support tube 1008 by bolts, and the terminal of the propeller support tube 1008 fixes the upper and lower brushless m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com