

Three-dimensional mark point matching method for point cloud registration and three-dimensional scanning method
A technology of point cloud splicing and matching methods, applied in the direction of optical devices, image data processing, measuring devices, etc., can solve problems such as unstable results, long time, and short time required
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] specific implementation plan
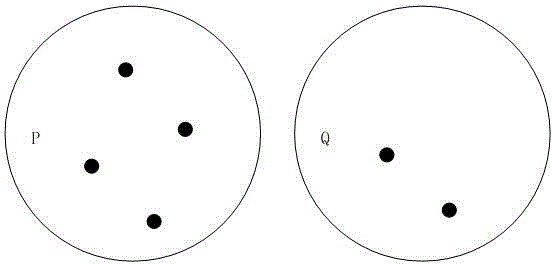
[0030] The present invention will be described in further detail below. The present invention uses the idea of the relaxation algorithm to self-dissolve the matching sets P and Q, and re-pair themselves, so that the "uniqueness" constraint, the "spatial feature constant" constraint and the "continuity" constraint are satisfied to the greatest extent, thereby eliminating Mismatch. The "uniqueness" constraint refers to the element p in the set P 1 , there is at most one point in the set Q that is the correct matching point. The "spatial feature invariance" constraint means that there is an element p in the set P 1 ,p 2 , if the matching element in the set Q is q 1 ,q 2 , then p 1 with p 2 The Euclidean distance must be equal to q 1 with q 2 Euclidean distance of . The "continuity" constraint means that there are usually many other correct matching pairs around the correct matching pair, while the opposite is true for the wrong m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More